Un motore passo-passo è un motore elettrico sincrono senza spazzole che converte gli impulsi digitali in rotazione meccanica dell'albero. Ogni giro del motore passo-passo è suddiviso in un numero discreto di passi, in molti casi 200, e al motore deve essere inviato un impulso separato per ogni passo. Il motore passo-passo può compiere solo un passo alla volta e ogni passo ha la stessa dimensione. Poiché ogni impulso fa ruotare il motore di un angolo preciso, in genere 1,8°, la posizione del motore può essere controllata senza alcun meccanismo di retroazione. All'aumentare della frequenza degli impulsi digitali, il movimento a passi si trasforma in una rotazione continua, con una velocità di rotazione direttamente proporzionale alla frequenza degli impulsi. I motori passo-passo sono utilizzati quotidianamente in applicazioni sia industriali che commerciali grazie al loro basso costo, all'elevata affidabilità, alla coppia elevata a basse velocità e alla struttura semplice e robusta che funziona in quasi tutti gli ambienti. Vantaggi dei motori passo-passo Conversione
di un segnale di ingresso
non lineare in un segnale di uscita lineare. Questo è comune per i segnali delle termocoppie. L'angolo di rotazione del
motore è proporzionale all'impulso in ingresso. Il motore ha una coppia piena a
regime stazionario (se gli avvolgimenti sono alimentati). Posizionamento preciso e
ripetibilità del movimento, poiché i motori passo-passo di buona qualità hanno una precisione dal 3 al 5% di un passo e questo errore non è cumulativo da un passo all'altro. Eccellente risposta
all'avvio/arresto/inversione. Molto affidabile poiché non ci sono spazzole
di contatto nel motore. Pertanto, la durata del motore passo-passo dipende semplicemente dalla durata del cuscinetto. La risposta dei motori passo-passo agli impulsi
digitali fornisce un controllo a ciclo aperto, rendendo il motore più semplice e meno costoso da controllare. È possibile ottenere una rotazione sincrona a
velocità molto bassa con un carico accoppiato direttamente all'albero. È possibile realizzare un'ampia gamma di velocità di rotazione
poiché la velocità è proporzionale alla frequenza degli impulsi in ingresso. Tipi di motori passo-passo Esistono tre tipi fondamentali di
motori passo-passo: a
riluttanza variabile, a magneti permanenti e ibridi. Questa discussione si concentrerà sul motore ibrido, poiché questi motori passo-passo combinano le migliori caratteristiche dei motori a riluttanza variabile e a magneti permanenti. Sono costruiti con poli statori a denti multipli e un rotore a magneti permanenti. I motori ibridi standard hanno 200 denti del rotore e ruotano con angoli di passo di 1,8º. Poiché presentano una coppia statica e dinamica elevata e funzionano a una frequenza di passo molto alta, i motori passo-passo ibridi sono utilizzati in un'ampia gamma di applicazioni commerciali, tra cui unità disco per computer, stampanti/plotter e lettori CD. Alcune applicazioni industriali e scientifiche dei motori passo-passo includono la robotica, le macchine utensili, le macchine pick and place, le macchine automatiche per il taglio e la saldatura dei fili e persino i dispositivi di controllo preciso dei liquidi. Le "modalità di passo" dei motori passo-passo includono Full, Half e
Microstep. Il
tipo di uscita della modalità di passo di qualsiasi motore passo-passo dipende dal design del driver. OMEGA offre azionamenti per motori passo-passo con modalità full e half step selezionabili tramite interruttore, nonché azionamenti microstepping con risoluzioni selezionabili dall'utente o tramite software. FULL STEP I motori passo-passo ibridi standard hanno 200 denti del rotore, ovvero
200 passi
completi per ogni giro dell'albero motore. Dividendo i 200 passi nei 360° di rotazione si ottiene un angolo di passo completo di 1,8°. Normalmente, la modalità full step si ottiene alimentando entrambi gli avvolgimenti mentre si inverte la corrente in modo alternato. Essenzialmente, un impulso digitale dal driver equivale a un passo. MEZZO PASSO Mezzo passo significa semplicemente che il motore passo-passo ruota a 400 passi per
giro. In
questa modalità, viene eccitato un avvolgimento e poi vengono eccitati alternativamente due avvolgimenti, facendo ruotare il rotore a metà della distanza, ovvero 0,9°. Sebbene fornisca una coppia inferiore di circa il 30%, la modalità mezzo passo produce un movimento più fluido rispetto alla modalità passo intero. MICROSPASSO Il microsollevamento è una tecnologia relativamente nuova per i motori passo-passo
che
controlla la corrente nell'avvolgimento del motore in modo da suddividere ulteriormente il numero di posizioni tra i poli. Gli azionamenti microstepping OMEGA sono in grado di dividere un passo completo (1,8°) in 256 microstep, ottenendo 51.200 passi per giro (0,007°/passo). Il microstepping viene tipicamente utilizzato in applicazioni che richiedono un posizionamento accurato e un movimento più fluido su un'ampia gamma di velocità. Come la modalità half-step, il microstepping fornisce circa il 30% di coppia in meno rispetto alla modalità full-step. Controllo del movimento lineare Il movimento rotatorio di un motore passo-passo può essere convertito
in movimento lineare
utilizzando un sistema di trasmissione a vite senza fine/ingranaggio a vite senza fine. Il passo della vite di comando è la distanza lineare percorsa per un giro della vite. Se il passo è pari a un pollice per giro e ci sono 200 passi completi per giro, la risoluzione del sistema a vite di comando è di 0,005 pollici per passo. È possibile ottenere una risoluzione ancora più fine utilizzando il sistema motore passo-passo/trasmissione in modalità microstepping. Collegamento in serie vs. collegamento in parallelo Esistono due modi per collegare un motore
passo-passo: in serie o in parallelo. Un collegamento in serie fornisce un'induttanza elevata e pertanto una coppia maggiore a basse velocità. Un collegamento in parallelo riduce l'induttanza, con conseguente aumento della coppia a velocità più elevate. Panoramica sulla tecnologia dei driver Il driver del motore passo-passo riceve i segnali di passo
e direzione dall'indicizzatore
o dal sistema di controllo e li converte in segnali elettrici per azionare il motore passo-passo. È necessario un impulso per ogni passo dell'albero motore. In modalità passo pieno, con un motore standard a 200 passi, sono necessari 200 impulsi di passo per completare un giro. La velocità di rotazione è direttamente proporzionale alla frequenza degli impulsi. Alcuni driver dispongono di un oscillatore integrato che consente di utilizzare un segnale analogico esterno o un joystick per impostare la velocità del motore. Le prestazioni in termini di velocità e coppia del motore passo-passo si basano sul flusso
di corrente dal driver all'avvolgimento del motore. Il fattore che inibisce il flusso, o limita il tempo necessario alla corrente per eccitare l'avvolgimento, è noto come induttanza. Per contrastare gli effetti dell'induttanza, la maggior parte dei circuiti driver è progettata per fornire una tensione superiore alla tensione nominale del motore. Maggiore è la tensione di uscita dal driver, maggiore è il livello di coppia rispetto alla velocità. In generale, la tensione di uscita del driver (tensione del bus) dovrebbe essere compresa tra 5 e 20 volte superiore alla tensione nominale del motore. Al fine di proteggere il motore da eventuali danni, l'azionamento del motore passo-passo dovrebbe essere limitato alla corrente nominale del motore passo-passo. Panoramica dell'indicizzatore L'indicizzatore, o controller, fornisce al driver uscite di passo
e direzione. La
maggior parte delle applicazioni richiede che l'indicizzatore gestisca anche altre funzioni di controllo, tra cui accelerazione, decelerazione, passi al secondo e distanza. L'indicizzatore può anche interfacciarsi con molti altri segnali esterni e controllarli. La comunicazione con l'indicizzatore avviene tramite una porta seriale RS-232 e, in alcuni casi,
una porta RS485 . In entrambi i casi, l'indicizzatore è in grado di ricevere comandi di alto livello da un computer host e di generare gli impulsi di passo e direzione necessari al driver. L'indicizzatore include I/O ausiliari per il monitoraggio degli ingressi da fonti esterne quali interruttori
Go, Jog, Home o Limit. È possibile anche avviare altre funzioni della macchina tramite i pin di uscita I/O. Funzionamento autonomo In modalità autonoma, l'indicizzatore può funzionare indipendentemente dal computer host. Una volta
scaricati nella memoria
non volatile, i programmi di movimento possono essere avviati da vari tipi di interfacce operatore, come una tastiera o un touchscreen, oppure da un interruttore tramite gli ingressi I/O ausiliari. Un sistema di controllo del motore passo-passo autonomo è spesso fornito in bundle con un driver e un alimentatore e un feedback dell'encoder opzionale per applicazioni a "circuito chiuso" che richiedono il rilevamento dello stallo e la compensazione esatta della posizione del motore. Controllo multiasse In questi casi è disponibile un sistema di controllo multiasse. Un hub di rete HUB 444,

ad esempio, può avere
fino a quattro azionamenti passo-passo collegati, ciascuno dei quali è collegato a un motore passo-passo separato. L'hub di rete fornisce un movimento coordinato per applicazioni che richiedono un elevato grado di sincronizzazione, come l'interpolazione circolare o lineare. Scelta di un motore passo-passo e di un azionamento La scelta di un motore passo-passo dipende dai requisiti di coppia e velocità
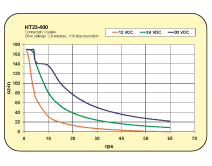
dell'applicazione. Utilizzare la curva
coppia-velocità del motore (riportata nelle specifiche di ciascun azionamento) per selezionare un motore adatto allo scopo. Ogni azionamento passo-passo della linea OMEGA mostra le curve coppia-velocità per i motori consigliati per quell'azionamento. Se i requisiti di coppia e velocità possono essere soddisfatti da più motori passo-passo, scegliere un azionamento in base alle esigenze del sistema di movimento: passo/direzione, programmabile autonomo, Ingressi analogici, microstepping), quindi scegliere uno dei motori consigliati per quel drive. L'elenco dei motori consigliati si basa su test approfonditi effettuati dal Produttore per garantire prestazioni ottimali della combinazione motore passo-passo e drive. Scegli il motore passo-passo giusto per la propria applicazione Passi e direzione Questi azionamenti per motori passo-passo accettano

impulsi di passo e segnali di direzione/abilitazione da

un controller, come un
PLC o un PC. Ogni impulso di passo fa ruotare il motore di un angolo preciso, con la frequenza degli impulsi che determina la velocità di rotazione. Il segnale di direzione determina la direzione di rotazione (CW o CCW), mentre il segnale di abilitazione accende o spegne il motore. Ulteriori informazioni Oscillatore I motori passo-passo con oscillatore digitale integrato accetta un ingresso analogico o un joystick per il

della velocità.
Questi sistemi sono generalmente utilizzati in applicazioni che richiedono un movimento continuo piuttosto che un controllo di posizione, come miscelatori, frullatori e distributori. Ulteriori informazioni Programmabile autonomo Tutti questi azionamenti passo-passo possono essere programmati per

autonomo; il programma
di controllo del movimento viene creato con una semplice interfaccia software di alto livello drag-and-drop (inclusa gratuitamente), quindi scaricato ed eseguito all'accensione. Il programma di controllo del movimento in genere attende un input, come la chiusura di un interruttore o la pressione di un pulsante, prima di eseguire il movimento programmato. Ulteriori informazioni Motori passo-passo ad alte prestazioni Questi

motori passo-passo offrono caratteristiche
avanzate quali diagnostica di autotest, protezione dai problemi, autoregolazione, livellamento delle ondulazioni di coppia, livellamento dei segnali di comando e algoritmi antirisonanza. Alcuni azionamenti sono programmabili in modo autonomo, mentre altri offrono ingressi analogici e di passo/direzione. Gli azionamenti ad alte prestazioni forniranno le migliori prestazioni possibili per il vostro sistema di controllo del movimento. Ulteriori


Cavo con isolamento minerale | Usi e vantaggi del suo utilizzo Quali sono i vantaggi del cavo con isolamento minerale?