
La medición de caudal másico es la base de muchos elementos clave en toda la industria, incluidas la mayoría de las formulaciones de recetas, las determinaciones del balance de materiales y las operaciones de facturación y transferencia de custodia. Dado que se trata de las mediciones de caudal más críticas en una planta de procesamiento, la fiabilidad y la precisión de la detección del caudal másico son muy importantes.
Una (breve) historia de la medición del caudal másico
En el pasado, el caudal másico se calculaba a menudo a partir de las salidas de un caudalímetro y un densímetro. Los cambios de densidad se medían directamente o se calculaban utilizando los resultados de los transmisores de temperatura y presión del proceso. En última instancia, dado que la relación entre la presión o la temperatura del proceso y la densidad no siempre se conoce con precisión, estas mediciones no eran muy exactas.
Uno de los primeros diseños de caudalímetros autónomos funcionaba utilizando el momento angular: tenía un impulsor accionado por motor que impartía momento angular (movimiento giratorio) acelerando el fluido a una velocidad angular constante. Cuanto mayor era la densidad, más momento angular se requería para obtener esta velocidad angular. Aguas abajo del impulsor accionado, una turbina estacionaria sujeta por un resorte se exponía a este momento angular. El par resultante (torsión del resorte) era una indicación del caudal másico. Sin embargo, debido a sus complejos diseños mecánicos y a sus elevados costes de mantenimiento, este tipo de medidores han sido sustituidos en gran medida por diseños más robustos y que requieren menos mantenimiento.
Uno de estos diseños es el medidor de flujo másico Coriolis, que está ampliamente considerado como el tipo más preciso de medidor de flujo másico y se utiliza mucho en aplicaciones industriales para realizar mediciones precisas. Los caudalímetros Coriolis cuentan con instrumentos que funcionan según los principios del efecto Coriolis, un fenómeno notable (y extraño) por el cual una masa que se mueve en un sistema giratorio experimenta una fuerza que actúa perpendicularmente a la dirección del movimiento y al eje de rotación. Las primeras patentes industriales de Coriolis se remontan a la década de 1950 y los primeros caudalímetros de flujo másico Coriolis se fabricaron en la década de 1970.

El principio de Coriolis
Fue G.G. Coriolis, un ingeniero francés, quien observó por primera vez que todos los cuerpos que se mueven sobre la superficie de la Tierra tienden a desviarse lateralmente debido a la rotación del planeta hacia el este. En el hemisferio norte, la desviación se produce hacia la derecha del movimiento; en el hemisferio sur, la desviación se produce hacia la izquierda. Esta deriva desempeña un papel fundamental tanto en la actividad de las mareas oceánicas como en el clima del planeta. Dado que un punto del ecuador traza un círculo mayor por día que un punto más cercano a los polos, un cuerpo que se desplace hacia cualquiera de los polos se desviará hacia el este, ya que conserva su mayor velocidad de rotación (hacia el este) al pasar por la superficie de la Tierra, que gira más lentamente. Esta deriva se define como la fuerza de Coriolis.
Cuando un fluido fluye por una tubería y se ve sometido a la aceleración de Coriolis mediante la introducción mecánica de una rotación aparente en la tubería, la cantidad de fuerza de desviación generada por el efecto inercial de Coriolis será una función del caudal másico del fluido. Si un tubo gira alrededor de un punto mientras el líquido fluye a través de él (hacia el centro de rotación o alejándose de él), ese fluido generará una fuerza inercial (que actúa sobre el tubo) que será perpendicular a la dirección del flujo.
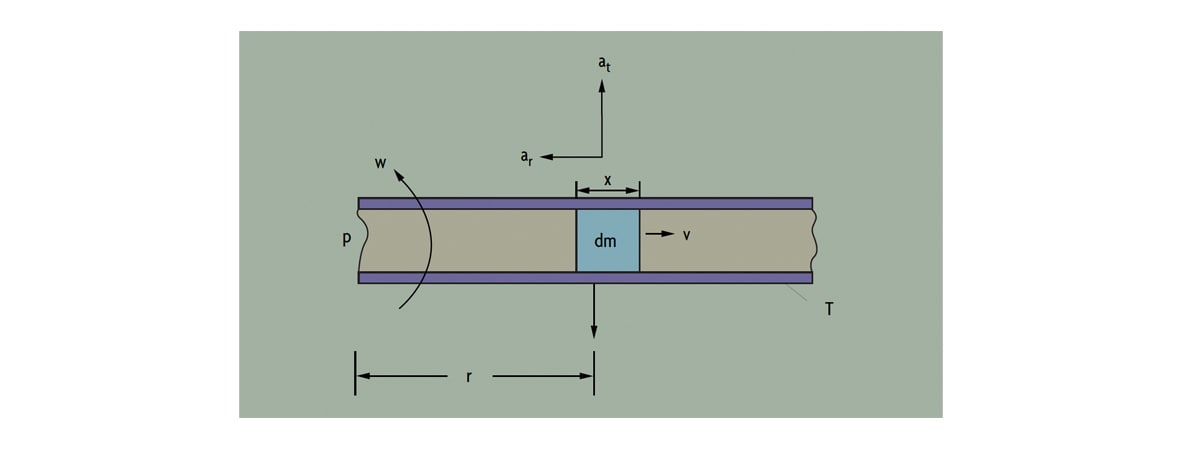 Figura 1: El principio de Coriolis
Figura 1: El principio de Coriolis Con referencia a la figura 1, una partícula (dm) se desplaza a una velocidad (V) dentro de un tubo (T). El tubo gira alrededor de un punto fijo (P) y la partícula se encuentra a una distancia de un radio (R) del punto fijo. La partícula se mueve con una velocidad angular (w) bajo dos componentes de aceleración, una aceleración centrípeta dirigida hacia P y una aceleración de Coriolis que actúa en ángulo recto con respecto a ar:
ar (centrípeto) = w2r
at (Coriolis) = 2wv
Para impartir la aceleración de Coriolis (at) a la partícula de fluido, el tubo debe generar una fuerza de at (dm). La partícula de fluido reacciona a esta fuerza con una fuerza de Coriolis igual y opuesta:
Fc = at(dm) = 2wv(dm)
Entonces, si el fluido del proceso tiene una densidad (D) y fluye a velocidad constante dentro de un tubo giratorio de área transversal A, un segmento del tubo de longitud X experimentará una fuerza de Coriolis de magnitud:
Fc = 2wvDAx
Dado que el caudal másico es dm = DvA, la fuerza de Coriolis Fc = 2w(dm)x y, finalmente:
Caudal másico = Fc / (2wx)
Así es como la medición de la fuerza de Coriolis ejercida por el fluido que fluye sobre el tubo giratorio puede proporcionar una indicación del caudal másico. Aunque girar un tubo no es necesariamente un procedimiento operativo estándar práctico a la hora de construir un caudalímetro comercial, oscilar o vibrar el tubo, lo cual es práctico, puede lograr el mismo efecto.
¿Cómo funciona un medidor de flujo Coriolis?
Los medidores de flujo másico Coriolis miden la masa a través de la inercia. Un líquido o gas fluye a través de un tubo que es vibrado por un pequeño actuador. Esto introduce artificialmente una aceleración Coriolis en la corriente que fluye, lo que produce una fuerza de torsión medible en el tubo que da lugar a un cambio de fase. Esta fuerza de torsión es proporcional a la masa, y el medidor mide el caudal másico detectando el momento angular resultante. Los caudalímetros de caudal Coriolis son capaces de medir el caudal a través del tubo tanto en dirección hacia adelante como hacia atrás.
En la mayoría de los diseños, el tubo está anclado en dos puntos y vibra entre estos anclajes. Esta configuración puede imaginarse como la vibración de un conjunto de resorte y masa. Una vez puesto en movimiento, un conjunto de resorte y masa vibrará a su frecuencia de resonancia, que es una función de la masa de ese conjunto. Se selecciona esta frecuencia de resonancia porque se necesita la menor fuerza motriz para mantener el tubo lleno en vibración constante.
Existen recomendaciones sugeridas para la instalación de un caudalímetro Coriolis con el fin de garantizar que el medidor funcione correctamente.
Diseños de tubos
Un tubo puede tener forma de U o recta, y algunos diseños también pueden ser autodrenantes al ser montados verticalmente (Figura 2). Cuando el diseño consta de dos tubos paralelos, el flujo se divide en dos corrientes mediante un divisor cerca de la entrada del medidor y se recombina en la salida. En el diseño de un solo tubo continuo (o en dos tubos unidos en serie), el flujo no se divide dentro del medidor.
En cualquiera de los dos casos, los controladores hacen vibrar estos tubos de medición. Estos controladores consisten en una bobina conectada a un tubo y un imán conectado al otro. El transmisor aplica una corriente alterna a la bobina, lo que hace que el imán sea atraído y repelido por turnos, lo que obliga a los tubos a acercarse y alejarse entre sí. El sensor puede detectar la posición, la velocidad o la aceleración de los tubos. Si se utilizan sensores electromagnéticos, el imán y la bobina de los sensores cambian sus posiciones relativas a medida que los tubos vibran, lo que provoca un cambio en el campo magnético de la bobina. Por lo tanto, la salida de tensión sinusoidal que sale de la bobina representa el movimiento de los tubos.
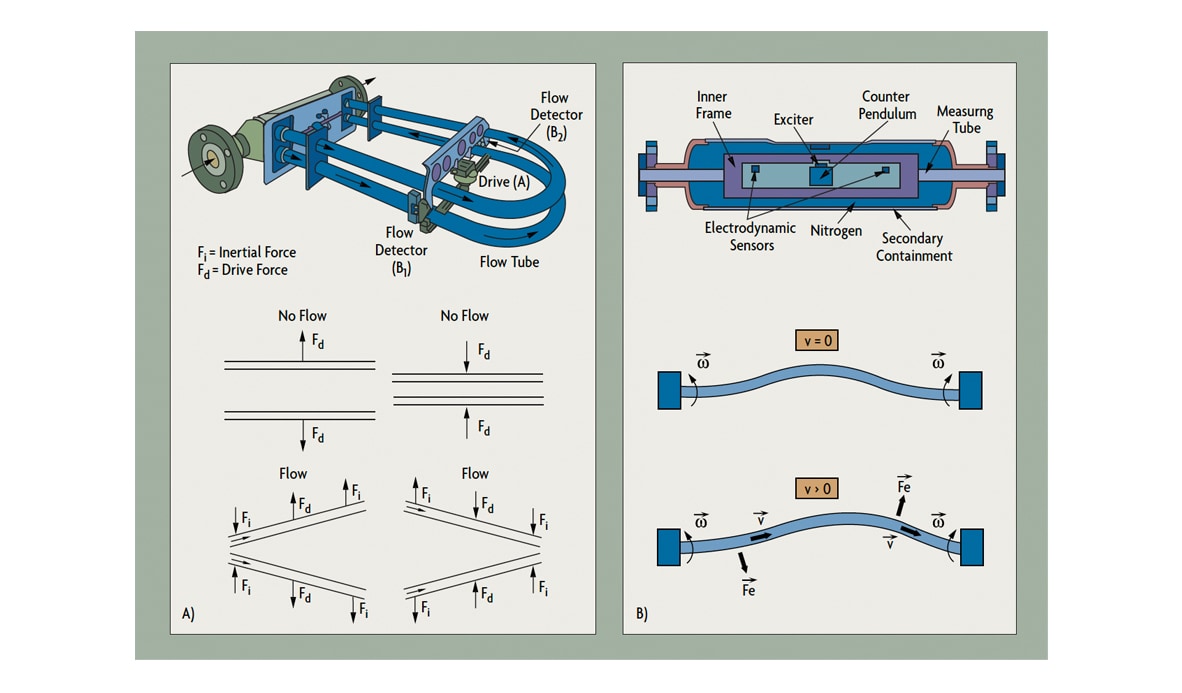 Figura 2-A y Figura 2-B: Funcionamiento/operación del medidor Coriolis de dos tubos y de tubo recto
Figura 2-A y Figura 2-B: Funcionamiento/operación del medidor Coriolis de dos tubos y de tubo recto Cuando no hay flujo en un diseño de dos tubos (Figura 2-A), la vibración causada por la bobina y el accionamiento magnético da lugar a desplazamientos idénticos en los dos puntos de detección (B1 y B2). Cuando hay flujo, las fuerzas de Coriolis actúan para producir una vibración de torsión secundaria, lo que da lugar a una pequeña diferencia de fase en los movimientos relativos. Esto se detecta en los puntos de medición. La deflexión de los tubos causada por la fuerza de Coriolis solo existe cuando hay flujo axial de fluido y vibración del tubo. La vibración con caudal cero, o el caudal sin vibración, no produce una salida del medidor.
La frecuencia natural de la estructura del tubo es una función de su geometría, los materiales de construcción y la masa del conjunto del tubo (masa del tubo más la masa del fluido dentro del tubo). La masa del tubo es fija. Dado que la masa del fluido es su densidad (D) multiplicada por su volumen (que también es fijo), la frecuencia de vibración puede relacionarse con la densidad del fluido de proceso (D). Por lo tanto, la densidad del fluido puede determinarse midiendo la frecuencia de resonancia de la oscilación de los tubos. (Tenga en cuenta que la densidad puede medirse con caudal cero, siempre que los tubos estén llenos de fluido y vibrando).
El espesor de la pared varía considerablemente de un diseño a otro; sin embargo, incluso los tubos más resistentes serán más delgados que las tuberías de proceso. Para obtener la mayor vida útil del medidor, se recomienda seleccionar el diseño con la pared más gruesa y la velocidad de flujo más lenta que pueda proporcionar la precisión y el rango requeridos.
Diseños de transmisores
Los transmisores pueden funcionar con corriente alterna o continua y requieren un cableado independiente para la fuente de alimentación y para sus señales de salida. El transmisor del medidor de flujo Coriolis puede montarse de forma integrada o remota (Figura 3). El transmisor controla el funcionamiento del controlador y procesa y transmite las señales del sensor. El factor de calibración (K) en la memoria del transmisor hace coincidir el transmisor con el tubo de flujo concreto. Este factor de calibración define la constante de proporcionalidad entre la fuerza de Coriolis y el caudal másico para la constante dinámica del muelle de los tubos vibratorios concretos.
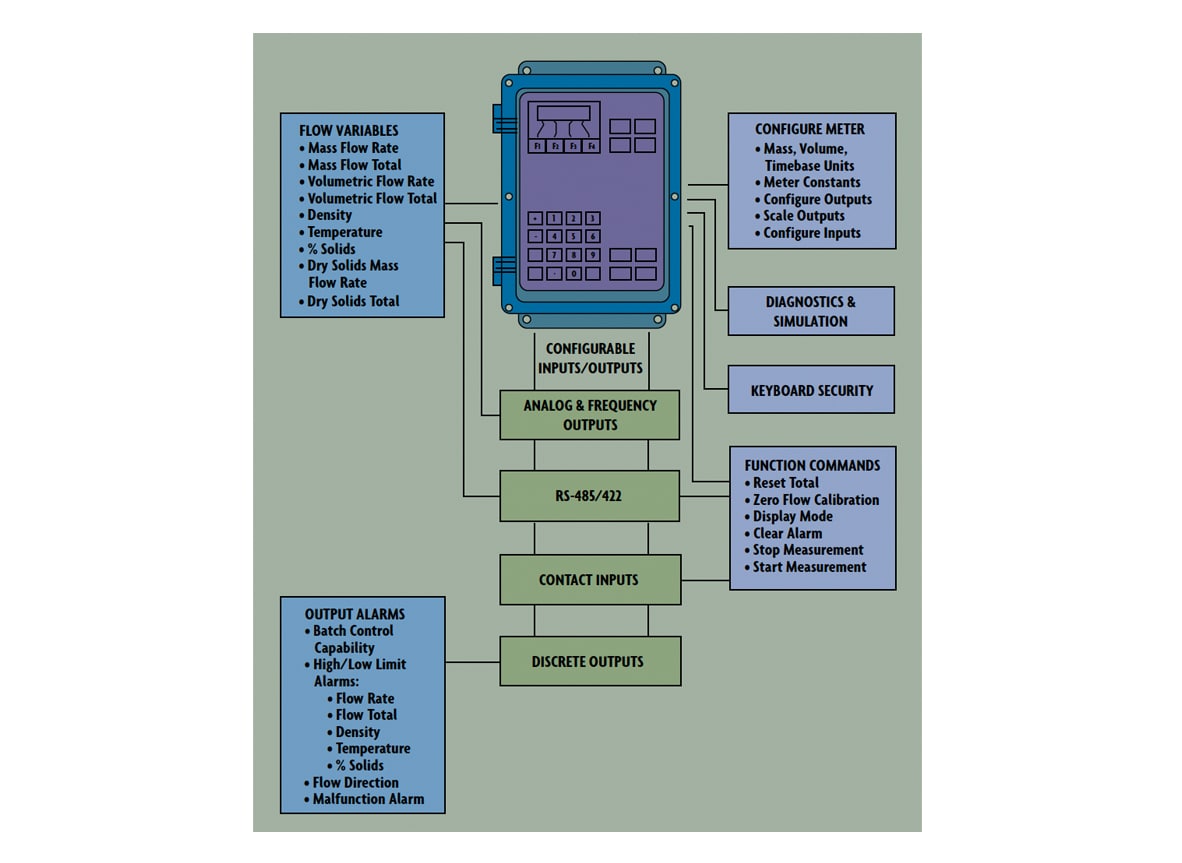 Figura 3: Transmisor Coriolis con teclado y pantalla
Figura 3: Transmisor Coriolis con teclado y pantalla El transmisor hace más que convertir las entradas del sensor en señales de salida estandarizadas. La mayoría de los transmisores también ofrecen múltiples salidas, incluyendo caudal másico, caudal másico total, densidad y temperatura. Hay disponibles salidas analógicas y/o de impulsos, y los transmisores inteligentes pueden generar salidas digitales para su integración en sistemas DCS.
Los transmisores suelen estar provistos de pantallas y teclados locales para facilitar el acceso a los datos del proceso. Los transmisores Coriolis proporcionan más que simple información de caudal y funciones auxiliares. También están disponibles funciones de control de lotes, monitorización del porcentaje de Brix o del porcentaje de HFCS, viscosidad, porcentaje de sólidos, PID, gravedad API y gravedad específica. Cuando se desea obtener información sobre la viscosidad, es necesario medir la caída de presión del medidor. Otras funciones pueden requerir que la información se programe previamente en la memoria del transmisor. Además, los transmisores tienen otras opciones de hardware y software que permiten al usuario personalizarlos para la aplicación.
Evolución de Coriolis
La primera generación de medidores Coriolis consistía en un único tubo curvo de pared delgada, en el que se creaban altas velocidades de fluido al reducir el área de la sección transversal del tubo en relación con la tubería de proceso. La distorsión del tubo se medía en referencia a un punto o plano fijo. Los tubos se excitaban de tal manera que se creaban fuerzas de flexión localizadas de alta amplitud en los puntos de anclaje. Esto provocaba graves problemas de vibración, que se aliviaron con diseños de dos tubos (Figura 2-A).
Estos diseños de dos tubos redujeron la interferencia de vibraciones externas, disminuyeron la potencia necesaria para hacer vibrar los tubos y minimizaron la energía vibratoria que salía de la estructura del tubo. Se utilizó un accionador para iniciar la vibración del tubo y dos sensores para detectar las desviaciones de Coriolis. Aunque este diseño mejoró considerablemente el rendimiento, la combinación de un diámetro interior reducido, tubos de pared delgada y altas velocidades de fluido (hasta 50 pies/segundo) seguía provocando fallos prematuros del medidor, incluyendo derrames potencialmente catastróficos cuando el medidor se utilizaba en servicios corrosivos y erosivos. Además, las pérdidas de carga no recuperadas eran elevadas (a veces superiores a 50 psid) y la precisión no era lo suficientemente alta como para permitir a los usuarios convertir los procesos por lotes en procesos continuos.
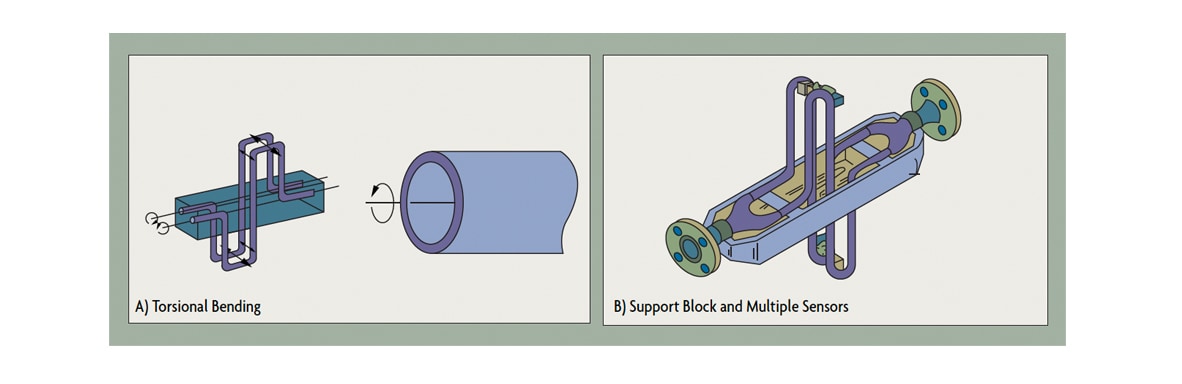 Figura 4-A y Figura 4-B: Mejoras en el diseño Coriolis
Figura 4-A y Figura 4-B: Mejoras en el diseño Coriolis Las mejoras de diseño más recientes incluyen la introducción de una variedad de nuevas formas de tubos, incluidos los que no dividen el flujo (Figura 2-B) y el uso de múltiples impulsores (Figura 5A). Los tubos de pared gruesa (cinco veces más gruesos que los diseños anteriores), el uso de diámetros de paso total y colectores pesados para lograr el aislamiento de la estructura del tubo de las tensiones inducidas por las conexiones de las tuberías, y las carcasas de los tubos de flujo que sirven también como recipientes de contención secundarios han contribuido a mejorar el rendimiento.
En algunos diseños, las tensiones de torsión sustituyeron a las de flexión, para evitar la concentración de tensiones que pueden provocar la rotura de los tubos (Figura 5B). En otros diseños, se han minimizado los efectos de la vibración de la tubería mediante el montaje de las estructuras de tubos transversalmente a la tubería.
Estas mejoras aumentaron el número de proveedores y contribuyeron al desarrollo de una nueva generación de medidores Coriolis tan fiables y resistentes como los caudalímetros de flujo volumétrico tradicionales. Los nuevos diseños funcionan a velocidades de fluido más bajas (por debajo de 10 pies/segundo) y con caídas de presión más bajas (por debajo de 12 psid), pueden instalarse en cualquier orientación y proporcionan una vida útil más larga en servicios con lodos, viscosos, corrosivos o erosivos. Los tubos vibran muy por debajo de sus límites de resistencia y suelen estar fabricados en acero inoxidable, Hastelloy® y titanio.
Interferencias
El efecto de la fuerza de Coriolis sobre el tubo vibrante es pequeño. El caudal a escala completa puede causar una desviación de solo 0,001 pulgadas. Para obtener una capacidad de caudal de 100:1, los sensores deben ser capaces de detectar desviaciones con una precisión de 0,000001 pulgadas en entornos industriales en los que la presión, la temperatura y la densidad del fluido del proceso cambian constantemente, y en los que la vibración de los tubos interfiere en la medición.
La elasticidad de los tubos metálicos cambia con la temperatura; se vuelven más elásticos a medida que se calientan. Para eliminar el error de medición correspondiente, la temperatura del tubo se mide continuamente mediante un elemento RTD y se utiliza para compensar continuamente las variaciones en la elasticidad del tubo.
Los caudalímetros Coriolis suelen calibrarse con agua porque las constantes son válidas para todos los demás líquidos. La calibración de la densidad se suele realizar llenando los tubos con dos o más fluidos de calibración (estancados) de densidades conocidas.
Precisión y rango
Los medidores Coriolis proporcionan una imprecisión del 0,1-2 % de una tasa de caudal másico de hasta 100:1. En general, los diseños de tubos curvos proporcionan una capacidad de rango más amplia (de 100:1 a 200:1), mientras que los medidores de tubo recto están limitados a 30:1 a 50:1 y su precisión es menor. El error total del medidor es la suma de la imprecisión básica y el error de desplazamiento del cero, el error atribuible a la señal de salida irregular generada en condiciones de caudal cero. El error de desplazamiento del cero se convierte en la parte dominante del error total en el extremo bajo del rango de caudal, donde el error está entre el 1 % y el 2 % de la tasa. Algunos fabricantes indican la precisión global como porcentaje de la tasa para la parte superior del rango de caudal y como porcentaje del intervalo para la parte inferior, mientras que otros la indican como porcentaje de la tasa más un error de desplazamiento del cero.
Cuando se utiliza para la medición de la densidad, el rango de error típico de una medición Coriolis es de 0,002-0,0005 g/cc.
Errors are caused by air or gas pockets in the process fluid. In the case of homogenously dispersed small bubbles, more power is required to vibrate the tubes, whereas, if the gas separates from the liquid, a damping effect on tube vibration (and, consequently, error) develops. Small voids also cause noise because of the sloshing of the process liquid in the tubes. Larger voids will raise the energy required to vibrate the tubes to excessive levels and may cause complete failure.
Because the flow tube is subjected to axial, bending, and torsional forces during meter operation, if process or ambient temperature and pressure fluctuations alter these forces, performance may be affected, and re-zeroing of the meter may be required.
Variations in the density of the process fluid can affect the frequency transfer function of mechanical systems, necessitating the re-zeroing of older designs to protect them from degraded performance. Because of their tube configurations, newer designs are unaffected by density changes over wide ranges of specific gravity variations.
Sizing & Pressure Drop
Because of the wide rangeability of Coriolis flow meters (30:1 to as high as 200:1), the same flow can be measured by two or three different sized flow tubes. By using the smallest possible meter, one will lower the initial cost and reduce coating build-up but will increase erosion/corrosion rates and head loss, increasing pumping and operating costs.
Los errores son causados por bolsas de aire o gas en el fluido del proceso. En el caso de pequeñas burbujas dispersas de manera homogénea, se requiere más potencia para hacer vibrar los tubos, mientras que, si el gas se separa del líquido, se produce un efecto de amortiguación en la vibración del tubo (y, en consecuencia, un error). Los pequeños huecos también causan ruido debido al chapoteo del líquido de proceso en los tubos. Los huecos más grandes aumentarán la energía necesaria para hacer vibrar los tubos a niveles excesivos y pueden provocar un fallo completo.
Dado que el tubo de flujo está sometido a fuerzas axiales, de flexión y de torsión durante el funcionamiento del medidor, si las fluctuaciones de la temperatura y la presión del proceso o del ambiente alteran estas fuerzas, el rendimiento puede verse afectado y puede ser necesario volver a poner a cero el medidor.
Las variaciones en la densidad del fluido de proceso pueden afectar a la función de transferencia de frecuencia de los sistemas mecánicos, lo que obliga a volver a poner a cero los diseños más antiguos para protegerlos de un rendimiento degradado. Debido a la configuración de sus tubos, los diseños más nuevos no se ven afectados por los cambios de densidad en amplios rangos de variaciones de gravedad específica.
Dimensionamiento y caída de presión
Debido al amplio rango de medición de los caudalímetros Coriolis (de 30:1 a hasta 200:1), el mismo flujo puede medirse con dos o tres tubos de flujo de diferentes tamaños. Al utilizar el medidor más pequeño posible, se reducirá el coste inicial y la acumulación de revestimiento, pero aumentarán las tasas de erosión/corrosión y la pérdida de carga, lo que incrementará los costes de bombeo y funcionamiento.
La reducción del tamaño (utilizando un medidor más pequeño que la tubería) es aceptable cuando la tubería es de gran tamaño y el fluido del proceso es limpio y de baja viscosidad.
Los diferentes medidores Coriolis provocan diferentes caídas de presión, pero en general requieren más que los medidores volumétricos tradicionales, que suelen funcionar a menos de 10 psid. Esta mayor pérdida de carga se debe al diámetro reducido de la tubería y al recorrido tortuoso del flujo. Además de los costes de bombeo, la pérdida de carga puede ser motivo de preocupación si el medidor se instala en un sistema de baja presión, si existe la posibilidad de cavitación o evaporación instantánea, o si la viscosidad del fluido es muy alta.
La viscosidad de los fluidos no newtonianos es una función de su velocidad de flujo. Los fluidos diletantes, por ejemplo, aumentan su viscosidad aparente (resistencia al flujo) a medida que aumenta su velocidad. Esta viscosidad aparente puede ser drásticamente superior a su viscosidad cuando están estancados. Para proporcionar a los proveedores datos sobre la viscosidad del flujo en una tubería concreta, se puede utilizar como aproximación la pérdida de carga por pie de tubería (utilizada en los cálculos de dimensionamiento de bombas). Proporcionan una alta precisión en la medición del caudal másico, la densidad, la temperatura y la viscosidad.
A diferencia de las tecnologías basadas en la velocidad (como los caudalímetros de desplazamiento positivo, los caudalímetros ultrasónicos y los caudalímetros de turbina), los caudalímetros de caudal másico Coriolis pueden detectar el caudal de cualquier tipo de gas moderadamente denso o fluido de bajo caudal, incluyendo petróleo crudo y otros tipos de combustibles, agentes de limpieza y otros productos químicos, aceites vegetales y grasas animales, pasta de dientes y alcohol, todo tipo de productos alimenticios y líquidos no newtonianos. Hay disponibles diseños autodrenantes para aplicaciones sanitarias que cumplen los requisitos de limpieza in situ.
La mayoría de los medidores están provistos de circuitos intrínsecamente seguros entre el tubo de flujo y el transmisor. Por lo tanto, la cantidad de potencia motriz que se puede suministrar al tubo de flujo es limitada.
Cuando se descarga fluido de camiones cisterna, bidones o vagones de ferrocarril, puede producirse un flujo discontinuo, lo que hace que la salida del medidor sea impredecible. Si el transmisor cuenta con una función de recuperación del flujo discontinuo, parará la medición cuando se detecte un flujo discontinuo por el exceso de potencia de accionamiento consumida o por la caída de la densidad del proceso (reducción de la amplitud de salida del sensor).
La cantidad de aire en el fluido de proceso que puede tolerar un medidor varía en función de la viscosidad del fluido. Los líquidos con viscosidades de hasta 300 000 centipoises pueden medirse con medidores Coriolis. El contenido de gas en líquidos tan viscosos puede alcanzar el 20 %, con pequeñas burbujas que permanecen dispersas de forma homogénea. El contenido de gas en fluidos de baja viscosidad, como la leche, se separará en concentraciones tan bajas como el 1 %.
Los caudalímetros de flujo Coriolis de tamaño medio (menos de 2 pulgadas) ofrecen períodos de amortización cortos en aplicaciones en las que la precisión de la medición reduce los costes de producción (baños, facturación) o en las que se necesitan múltiples mediciones (incluidas la densidad, la temperatura y la presión). Por otro lado, pueden no ser competitivos cuando se utilizan en aplicaciones de medición de caudal simples en las que los sensores volumétricos son suficientes y en las que la repetibilidad es más importante que la precisión. La capacidad de extraer datos sobre la masa total cargada, la tasa de sólidos, el porcentaje de sólidos y la viscosidad a partir de un solo instrumento reduce el coste total de la medición, mejora el control del proceso y proporciona redundancia para otros instrumentos.
Los diseños de tubo continuo suelen ser los preferidos para aplicaciones con lodos y otros fluidos multifásicos. El caudal total se divide mediante divisores en los diseños de tubo dividido, y las dos corrientes resultantes no tienen que tener exactamente el mismo caudal másico para mantener la precisión (sin embargo, sí deben tener la misma densidad). Las diferentes densidades en los dos tubos paralelos desequilibran el sistema y crean errores de medición. Por lo tanto, si hay una fase secundaria en la corriente, es posible que un simple divisor de flujo no distribuya uniformemente el flujo entre los dos tubos.
Los diseños de tubo continuo también son preferibles para medir fluidos que pueden recubrir y/u obstruir el medidor. Los tubos continuos, si se dimensionan para pasar las partículas sólidas más grandes del fluido de proceso, son menos propensos a obstruirse y más fáciles de limpiar.
Los diseños de tubo recto se pueden limpiar por medios mecánicos, mientras que los diseños de tubo curvo suelen lavarse con soluciones de limpieza a velocidades superiores a 10 pies/segundo. Los diseños de tubo recto también son preferibles para aplicaciones sanitarias debido a los requisitos de autodrenaje.


¿Qué es un anemómetro y qué mide? Introducción a la medición de la velocidad del aire