El control proporcional integral derivativo (PID) es una forma bien establecida de conducir un sistema hacia una posición o nivel objetivo. Es prácticamente omnipresente como medio para controlar la temperatura y se aplica en innumerables procesos químicos y científicos, así como en la automatización.
Sin embargo, el control PID no está exento de problemas. Puede dar resultados menos que ideales en situaciones en las que el valor objetivo cambia, ya sea como una función escalonada o como parte de un perfil de «rampa y reposo».
 Controladores de temperatura y procesos de la serie PLATINUM
Controladores de temperatura y procesos de la serie PLATINUM En un esfuerzo por mejorar el rendimiento, algunos fabricantes de instrumentación están explorando el valor del uso de la «lógica difusa» para el control de procesos. Este informe técnico de OMEGA Engineering analiza tanto las debilidades de los sistemas PID como las ventajas potenciales de la lógica difusa, con especial referencia a cuestiones relacionadas con el control de la temperatura. Las secciones individuales abordan:
- Retos del PID
- Introducción a la lógica difusa para el control
- PID más lógica difusa adaptativa
- Aplicaciones
Retos del PID
Las matemáticas de una ecuación de control PID son complejas, con múltiples variables y constantes que interactúan entre sí. En cualquier aplicación dada, estas se seleccionan para seguir el valor objetivo lo más fielmente posible, dentro de las restricciones impuestas por el propio proceso y la instrumentación.
Tres problemas comunes a casi todas las aplicaciones de control de procesos son:
- Retrasos o desfases temporales
- Respuesta de función escalonada
- Respuesta de función «rampa y reposo»
 Demostrador del controlador PID de la serie PLATINUM
Demostrador del controlador PID de la serie PLATINUM En muchas situaciones, la salida puede tardar mucho tiempo, y quizás también de forma variable, en reaccionar a los cambios de entrada. Por poner un ejemplo, un horno se enfriará cuando se «cargue» con metal nuevo y podría tardar varios minutos en volver a alcanzar la temperatura. Esto puede provocar sobrepasos de temperatura que pueden dañar el contenido. Por otra parte, el calentamiento puede ser demasiado lento, lo que reduce la eficiencia del proceso y provoca efectos perjudiciales para el producto o el material.
Cuando el valor objetivo cambia instantáneamente, el PID obliga al sistema a aplicar un factor de corrección elevado, lo que de nuevo puede provocar un sobrepasamiento. Por otra parte, el sistema puede saturarse, incapaz de suministrar una corrección suficiente, lo que se suma al impacto del término «I».
Estos problemas también se producen en situaciones de «rampa y mantenimiento», donde la temperatura se aumenta gradualmente y luego se mantiene. El seguimiento de un cambio gradual en el punto de consigna puede suponer un reto para los sistemas de control PID.
Como resultado, la selección de los valores óptimos es un proceso de prueba y error conocido como «ajuste». A lo largo de los años se han desarrollado muchos enfoques para el ajuste, el más satisfactorio de los cuales parece ser el método «Ziegler Nichols». Sin embargo, este produce altos niveles de oscilación, lo que puede ser problemático en algunas situaciones.
Introducción al control de lógica difusa
La informática convencional se basa en la lógica booleana, lo que significa que todo se representa como cero o uno. En algunas situaciones, esto conduce a una simplificación excesiva y a resultados inadecuados. La lógica difusa y, por extensión, el control difuso, tratan de abordar la complejidad creando heurísticas que se ajustan más a la percepción humana de los problemas.
La lógica difusa es un área de concentración particular en el estudio de la inteligencia artificial y se basa en el valor de aquella información que no es ni definitivamente verdadera ni falsa. La información que los seres humanos utilizan en su vida cotidiana para basar sus decisiones intuitivas y aplicar reglas generales puede y debe aplicarse a aquellas situaciones de control que lo requieran. El conocimiento adquirido puede ser un arma poderosa para combatir los efectos indeseados de la respuesta del sistema.
La lógica difusa proporciona una forma de abordar la imprecisión y la no linealidad en situaciones de control complejas. Las entradas se pasan a un «motor de inferencia» donde se aplican reglas humanas o basadas en la experiencia para producir una salida.
PID Plus Lógica difusa adaptativa
El ajuste de los bucles PID depende de la heurística, pero a menudo acaba siendo subóptimo. La lógica difusa ofrece una alternativa a enfoques como el de Ziegler Nichols, y un número cada vez mayor de investigaciones sugiere que ofrece resultados superiores. Por lo tanto, parece que la forma ideal de controlar muchos procesos complejos es con un controlador PID ajustado con lógica difusa.
Un producto disponible en el mercado que incorpora este enfoque es la serie OMEGA® Platinum de controladores de temperatura y procesos. Esta familia de controladores PID compactos basados en microprocesadores, disponibles en tres tamaños DIN, está diseñada para ser fácil de configurar y utilizar. Se pueden conectar todos los termopares y RTD comunes, y el sistema habilita automáticamente solo las funciones relevantes para el tipo de entrada seleccionado. También hay disponibles entradas de tensión y corriente, lo que permite su uso con casi cualquier unidad de ingeniería. Estos controladores proporcionan una solución PID completa, compatible con programas complejos con hasta 16 secuencias de rampa y mantenimiento. La sintonización automática está disponible para aplicaciones PID con lógica difusa adaptativa para ayudar a obtener resultados óptimos.
¿Cómo funcionan los programas de lógica difusa?
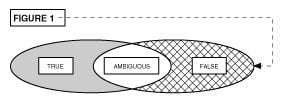
El software de control que utiliza programas difusos emplea un conjunto muy flexible de reglas «si... entonces». La solución se aplica entonces a las funciones de pertenencia adecuadas. En referencia a la Figura 1, los valores que se encuentran dentro del área sombreada se denominan verdaderos sin lugar a dudas. Los valores que se encuentran dentro del área rayada se denominan falsos sin lugar a dudas. Si todos los datos del proceso caen a un lado u otro del área de superposición, es probable que la lógica difusa sea de poca utilidad.
En la mayoría de las aplicaciones hay algunos puntos que se encuentran en el área común. La información que se encuentra dentro del área común debe estudiarse, almacenarse y utilizarse para cuantificar y clasificar los datos. Esto permite una manipulación inteligente de la estructura de datos con el fin de llegar a una solución. La información que se encuentra en esa área común puede clasificarse, datarse y hacerse una «mejor estimación» tras evaluar esta información «gris».
Otra ventaja de la lógica difusa en un sistema de control es cuantificar la señal de entrada en un entorno a veces «ruidoso». Este ruido, que tiende a corromper la integridad de la señal real, se trata mediante el sentido común del operador competente.
 Matemáticamente, la información debe evaluarse y prepararse para su uso en la toma de decisiones. Si un operador se tomara el tiempo de trazar la información del proceso en un sistema de coordenadas X-Y, podría aplicar visualmente un ajuste de curva a los datos del proceso y obtener una representación genérica bastante precisa.
Matemáticamente, la información debe evaluarse y prepararse para su uso en la toma de decisiones. Si un operador se tomara el tiempo de trazar la información del proceso en un sistema de coordenadas X-Y, podría aplicar visualmente un ajuste de curva a los datos del proceso y obtener una representación genérica bastante precisa.
Matemáticamente, ajustar una curva de orden inferior produciría una representación bastante inexacta. Por lo tanto, un ajuste de curva de orden superior sería adecuado para adaptarse a la señal ruidosa. La lógica difusa intenta emular cuál sería la respuesta humana y aplicar el ajuste más inteligente a los datos del proceso.
Teoría de control de Ziegler-Nichols
La teoría de control de Ziegler-Nichols proporciona números PID (proporcional, integral y derivativo) que ayudan en el funcionamiento de los controles. El desarrollo del control PID basado en microprocesadores de bajo coste ha sustituido a la mayoría de los dispositivos de tipo termostato (encendido/apagado). La mayoría de los controladores basados en microprocesadores tienen una función de autotuning que opera un experimento del sistema como se muestra en la figura 2. Este experimento ayuda a determinar las características térmicas de un sistema concreto. En la mayoría de los casos, el método de autotune consiste en realizar una entrada escalonada en el elemento de control final y supervisar la salida. Esto produce un término de ganancia directamente relacionado con la banda proporcional. El tiempo de retardo entre la aplicación de la entrada escalonada y la respuesta observada influye en el número derivativo.
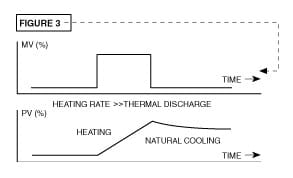
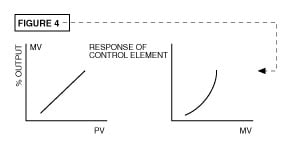
La mayoría de los controladores basados en microprocesadores tienen una función de autotuning que opera un experimento del sistema como se muestra en la figura 2. Este experimento ayuda a determinar las características térmicas de un sistema concreto. En la mayoría de los casos, el método de autotune consiste en realizar una entrada escalonada en el elemento de control final y supervisar la salida. Esto produce un término de ganancia directamente relacionado con la banda proporcional. El tiempo de retardo entre la aplicación de la entrada escalonada y la respuesta observada influye en el número derivativo. El tiempo de subida de la respuesta a la entrada escalonada produce un valor que se utiliza en la integración. En algunos sistemas, el tiempo de retardo para producir la respuesta es muy diferente del tiempo para ceder calor, como se muestra en la figura 3. Esto es común en muchas aplicaciones de extrusoras, lo que hace que el enfoque de lógica difusa sea muy beneficioso. Si la respuesta del elemento de control final, como se muestra en la figura 4, no es lineal, por cualquier razón, una respuesta lineal de la acción de proporcionalidad solo daría como resultado un control menos que aceptable.
 Además, si el sistema tiende a tener propiedades térmicas cambiantes o algunas irregularidades térmicas, el control de lógica difusa debería ofrecer una alternativa mejor al ajuste constante de los parámetros PID.
Además, si el sistema tiende a tener propiedades térmicas cambiantes o algunas irregularidades térmicas, el control de lógica difusa debería ofrecer una alternativa mejor al ajuste constante de los parámetros PID. La mayoría del software de lógica difusa comienza a construir su base de información durante la función de autotune. De hecho, la mayor parte de la información utilizada en las primeras etapas de la puesta en marcha del sistema proviene de las soluciones de autotune.
Aplicaciones
Actualmente existen muchas aplicaciones de lógica difusa utilizadas por dispositivos domésticos comunes, productos con los que la mayoría de la gente está familiarizada. La ventaja de la lógica difusa resulta evidente para el usuario de dispositivos de consumo, ya que el módulo o la función difusa está integrado en el producto.
La ventaja de este enfoque elimina la necesidad de que el operador comprenda la teoría del funcionamiento difuso. El funcionamiento solo requiere la aplicación de conocimientos comunes a los parámetros estándar.
A menos que el control de bucle abierto sea aceptable, casi todas las aplicaciones de control de procesos se beneficiarían del control PID.
Unless open-loop control is acceptable, almost every process control application would benefit from PID control. En términos de control de temperatura, algunos buenos ejemplos son:
- Tratamiento térmico de metales. Las secuencias de «rampa y remojo» requieren precisión para garantizar que se logren las propiedades metalúrgicas deseadas.
- Secado/evaporación de disolventes de superficies pintadas. Las condiciones de temperatura excesiva pueden dañar los sustratos, mientras que las bajas temperaturas pueden provocar daños en el producto y un aspecto deficiente.
- Curado del caucho. El control preciso de la temperatura garantiza que se logre un curado completo sin afectar negativamente a las propiedades del material.
- Horneado. Los hornos comerciales deben seguir secuencias de calentamiento y enfriamiento estrictamente prescritas para garantizar que se produzcan las reacciones necesarias.
- Cerámica. Los hornos continuos deben proporcionar altos niveles de calor, pero están sujetos a cargas térmicas variables. Esto los convierte en una aplicación ideal para el control PID.
 Tratamiento térmico de metales....
Tratamiento térmico de metales....  Instalación de panadería industrial
Instalación de panadería industrial Conclusiones clave
El control de bucle cerrado intenta mantener el rendimiento real de un proceso lo más cerca posible del rendimiento objetivo o del punto de consigna.
El control PID es un método consolidado para proporcionar dicho control, pero requiere un ajuste para obtener un rendimiento óptimo. Dicho ajuste es complejo y difícil, por lo que normalmente se emplean técnicas heurísticas, como el método Ziegler Nichols.
Los procesos que requieren un cambio escalonado o un control «Ramp & Soak» son especialmente difíciles de manejar con las técnicas PID convencionales. Para solucionar este problema, los fabricantes de controladores como OMEGA están incorporando capacidades de ajuste automático basadas en la lógica difusa. Se utilizan técnicas computacionales avanzadas para ayudar a optimizar los bucles PID y proporcionar mejores niveles de control de procesos.


¿Qué es un calentador de inmersión? Tipo de elementos calefactores de inmersión ¿Qué es un calentador de inmersión?

¿Qué es un calentador eléctrico industrial? ¿Qué es un calentador industrial?