Aunque las tecnologías de medición de caudal analizadas en este capítulo (magnéticas, de vórtices y ultrasónicas) no son ni exclusivamente ni exhaustivamente electrónicas por naturaleza, sí representan una agrupación lógica de tecnologías de medición de caudal. Todas ellas carecen de piezas móviles (bueno, quizá vibrantes), son relativamente no intrusivas y son posibles gracias a la
sofisticada tecnología de la Electrónica actual. Los caudalímetros magnéticos , por ejemplo, son los más directamente eléctricos por naturaleza, ya que sus principios básicos de funcionamiento se derivan de la ley de Faraday. Los medidores de vórtices dependen de sensores piezoeléctricos para detectar los vórtices que se desprenden de una barra de
desprendimiento
estacionaria. Y los actuales medidores de flujo ultrasónicos actuales deben su exitosa aplicación al sofisticado procesamiento de señales digitales . Caudalímetros magnéticos El funcionamiento de los caudalímetros magnéticos se basa en la ley de Faraday de la inducción electromagnética. Los caudalímetros magnéticos solo pueden detectar el flujo de fluidos
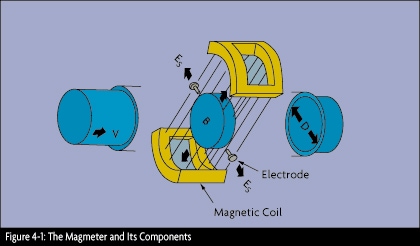
conductivos. Los primeros diseños de medidores magnéticos requerían una conductividad fluida mínima de 1-5 microsiemens por centímetro para su funcionamiento. Los diseños más recientes han reducido ese requisito cien veces, hasta situarlo entre 0,05 y 0,1. El caudalímetro magnético consiste en un tubo no magnético revestido con un material aislante. Un par de bobinas magnéticas está situado como se muestra en la figura 4-1, y un par de electrodos penetra en el tubo y su revestimiento. Si un fluido conductor fluye a través de un tubo de diámetro (D) a través de una densidad de campo magnético (B) generada por las bobinas, la cantidad
de
voltaje (E) desarrollada a través de los electrodos, según lo predicho por la ley de Faraday, será proporcional a la velocidad (V) del líquido. Dado que la densidad del campo magnético y el diámetro de la tubería son valores fijos, se pueden combinar en un factor de calibración
 (K) y la
(K) y la ecuación se reduce a: E = KV Las diferencias de velocidad en diferentes puntos del perfil de flujo se compensan mediante un factor de ponderación de la señal. La compensación también se consigue dando forma a las bobinas magnéticas de manera que el flujo magnético sea mayor donde el factor de ponderación de la señal es bajo, y viceversa. Figura 4-1 Los fabricantes determinan el factor K de cada medidor
magnético mediante la calibración con agua de cada tubo de flujo. El valor K así obtenido es válido para cualquier otro líquido conductor y es lineal en todo el rango del medidor de flujo. Por esta razón, los tubos de flujo suelen calibrarse a una sola velocidad. Los medidores magnéticos pueden medir el flujo en ambas direcciones, ya que la inversión de
la dirección cambiará
la polaridad, pero no la magnitud de la señal. El valor K obtenido mediante pruebas con agua podría no ser válido para fluidos no newtonianos (con viscosidad dependiente de la velocidad) o lodos magnéticos (que contienen partículas magnéticas). Estos tipos de fluidos pueden afectar a la densidad del campo magnético en el tubo. Para ambos fluidos se debe considerar la calibración in situ y diseños de compensación especiales.
Excitación del medidor magnético La alimentación que se desarrolla en los electrodos es una señal de milivoltios. Esta señal se convierte normalmente en una corriente estándar (de 4 a 20 mA) o una salida de frecuencia (0-10 000 Hz) en el tubo de flujo o cerca de él. Los transmisores magnéticos inteligentes con salidas digitales permiten la conexión directa a un sistema de control distribuido. Dado que la señal del medidor magnético es débil, el cable conductor debe estar blindado y trenzado si el transmisor es remoto. Las bobinas del medidor magnético pueden alimentarse con corriente alterna o continua (Figura 4-2). Cuando se utiliza excitación de CA, se aplica tensión de
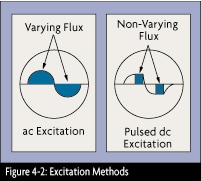 el ruido línea a las bobinas magnéticas. Como resultado, la señal de flujo (a flujo constante) también tendrá la forma de una onda sinusoidal. La amplitud de la onda es proporcional a la velocidad. Además de la señal de flujo, se pueden inducir tensiones de ruido en el bucle del electrodo. El ruido fuera de fase se filtra fácilmente, pero
el ruido línea a las bobinas magnéticas. Como resultado, la señal de flujo (a flujo constante) también tendrá la forma de una onda sinusoidal. La amplitud de la onda es proporcional a la velocidad. Además de la señal de flujo, se pueden inducir tensiones de ruido en el bucle del electrodo. El ruido fuera de fase se filtra fácilmente, pero
en fase requiere que se pare el flujo (con la tubería llena) y que la salida del transmisor se ponga a cero. El principal problema de los diseños de medidores magnéticos de CA es que el ruido puede variar con las condiciones del proceso y es necesario volver a poner a cero con frecuencia para mantener la precisión. En los diseños de excitación de CC, se
utiliza un pulso de CC de baja frecuencia (7-30 Hz) para excitar las bobinas magnéticas. Cuando las bobinas se activan por pulsos (Figura 4-2), el transmisor lee tanto las señales de flujo como las de ruido. Entre pulsos, el transmisor solo detecta la señal de ruido. Por lo tanto, el ruido se puede eliminar continuamente después de cada ciclo. Figura 4-2 Esto proporciona un cero
estable y elimina la deriva del cero. Además de ser más precisos y capaces de medir caudales más bajos, los medidores de CC son menos voluminosos, tienen una instalación sencilla, consumen menos energía y tienen un menor coste de propiedad que los medidores de CA. Un
nuevo diseño de CC utiliza una potencia significativamente mayor que las generaciones anteriores y, por lo tanto, crea una señal más fuerte
en el tubo de flujo. Otro nuevo diseño utiliza un exclusivo
esquema de doble excitación que pulsa las bobinas a 7 Hz para la Estabilidad cero y también a 70 Hz para obtener una señal más fuerte. Los transmisores de
medidores magnéticos pueden suministrarse con alimentación
de CA o CC. También hay disponible un caudalímetro magnético de CC de dos hilos y alimentación en bucle con un diseño intrínsecamente seguro, pero su rendimiento se ve reducido debido a las limitaciones de potencia. Recientemente también se han introducido medidores de CA pulsados, que eliminan los problemas de estabilidad cero de los diseños de CA
tradicionales. Estos dispositivos
contienen circuitos que interrumpen periódicamente la alimentación de CA, anulando automáticamente los efectos del ruido del proceso en la señal de salida. Hoy en día, la excitación de CC se utiliza en aproximadamente el 85 % de las instalaciones y los medidores magnéticos de CA ocupan el 15 % restante cuando se justifica por las siguientes condiciones: Cuando se arrastra aire en grandes
cantidades en la corriente del proceso Cuando la corriente del proceso es una suspensión y el tamaño de las partículas sólidas no es uniforme y/o la fase sólida no está mezclada de manera homogénea dentro del líquido; o Cuando el flujo es pulsátil a una
frecuencia inferior a 15 Hz. Cuando se da cualquiera de las tres condiciones anteriores, es probable que la salida de un medidor de CC pulsado sea ruidosa. En algunos casos, se puede minimizar el problema del ruido (mantener las fluctuaciones dentro del 1 % del punto de ajuste) filtrando y aplicando
amortiguación a la señal de salida. Si se requiere una amortiguación de más de 1 a 3 segundos para eliminar el ruido, siempre es mejor utilizar un medidor de CA. Tubos de flujo, revestimientos y sondas Las dimensiones cara a cara de los tubos de flujo con bridas (longitudes de tendido) suelen cumplir las recomendaciones de la Organización Internacional de Normalización (ISO). Las dimensiones de los medidores magnéticos de forma corta también suelen cumplir estas directrices. Los tubos de flujo magnéticos y los revestimientos están disponibles en muchos materiales y se
utilizan
ampliamente en todas las industrias de procesos, incluidas la alimentaria, la industria farmacéutica, la minera y la metalúrgica. Algunos materiales de revestimiento (en particular el PFA) pueden dañarse cuando se utilizan palancas para instalarlos o retirarlos de las tuberías de proceso. También pueden dañarse si se aprietan demasiado los pernos de las bridas. Los protectores de revestimiento están disponibles para ayudar a prevenir este tipo de daños. Por lo general, cualquier tubo de flujo puede utilizarse con cualquier transmisor ofrecido por el mismo Fabricante. Dependiendo de su construcción y características, el coste de un
 velocidad media caudalímetro magnético de 2 pulgadas puede oscilar entre 1500 y 5000 dólares. Este coste ha ido bajando, pero sigue siendo superior al de los sensores de flujo más baratos. Los caudalímetros magnéticos también pueden presentarse en forma de sondas e insertarse en los tubos de proceso a través de grifos. Estas sondas contienen tanto los electrodos como las bobinas magnéticas. El fluido del proceso en movimiento induce un voltaje en los electrodos, que refleja la velocidad en la punta de la sonda y no la
velocidad media caudalímetro magnético de 2 pulgadas puede oscilar entre 1500 y 5000 dólares. Este coste ha ido bajando, pero sigue siendo superior al de los sensores de flujo más baratos. Los caudalímetros magnéticos también pueden presentarse en forma de sondas e insertarse en los tubos de proceso a través de grifos. Estas sondas contienen tanto los electrodos como las bobinas magnéticas. El fluido del proceso en movimiento induce un voltaje en los electrodos, que refleja la velocidad en la punta de la sonda y no la
del fluido a través
de la tubería. Estos medidores magnéticos son económicos y retráctiles. Por lo tanto, no es necesario detener el proceso para instalarlos o retirarlos. La precisión de la medición depende en gran medida de la relación entre la velocidad medida y la velocidad media en la tubería. Electrodos En los tubos de flujo convencionales, los electrodos están en contacto con el fluido del proceso. Pueden ser extraíbles o permanentes si se fabrican con una gota
de platino líquido que se sinteriza a través de un revestimiento de cerámica y se fusiona con el óxido de aluminio para formar un sellado perfecto. Este diseño es el preferido debido a su bajo coste, su resistencia a la abrasión y al desgaste, su insensibilidad a la radiación nuclear y su idoneidad para aplicaciones sanitarias, ya que no hay cavidades en las que puedan crecer bacterias. Por otro lado, el tubo cerámico no tolera la flexión, la tensión o el enfriamiento repentino
y no puede
soportar ácidos oxidantes ni cáusticos calientes y concentrados. En un diseño más reciente de acoplamiento capacitivo, se utilizan electrodos sin contacto. Estos diseños utilizan áreas de metal intercaladas entre capas de material de revestimiento. Están disponibles en tamaños de menos de ocho pulgadas de diámetro y con revestimientos de cerámica. Los medidores magnéticos que utilizan estos electrodos sin contacto pueden «leer» fluidos con una conductividad 100 veces menor que
la requerida para accionar los tubos de flujo convencionales. Dado que el electrodo se encuentra detrás del revestimiento, estos diseños también son más adecuados para aplicaciones con recubrimientos severos. Figura 4-3 Desarrollos recientes Cuando un caudalímetro magnético cuenta con un sensor de nivel de capacitancia integrado en el revestimiento, también puede medir el flujo en tubos parcialmente llenos. En este diseño, los electrodos del medidor magnético se
encuentran en la parte inferior del tubo (aproximadamente a 1/10 del diámetro de la tubería) para permanecer cubiertos por el fluido. Se proporciona compensación para la acción de las olas y se proporciona calibración para el funcionamiento con tubería llena, sin flujo (nivel estático) y tubería parcialmente llena. Otro desarrollo reciente es un caudalímetro magnético con un tubo de flujo de acero al carbono sin revestimiento. En este diseño, los electrodos de medición se montan externamente al tubo de flujo sin revestimiento y las
bobinas magnéticas generan un campo 15 veces más fuerte que en un tubo convencional. Este campo magnético penetra profundamente en el fluido de proceso (no solo alrededor del electrodo, como ocurre con las sondas de medidores magnéticos estándar). La principal
ventaja es el bajo coste
inicial y de sustitución, ya que solo es necesario sustituir los sensores. Selección y dimensionamiento Los caudalímetros magnéticos pueden detectar el flujo de líquidos y lodos limpios, multifásicos, contaminados, corrosivos, erosivos o viscosos, siempre que su conductividad supere el mínimo requerido para el diseño concreto. La inexactitud y la capacidad de rango esperadas de los mejores diseños son del 0,2-1 % de la tasa, en un rango de 10:1 a 30:1, si la tasa del flujo
supera 1 pie/seg. A tasas de flujo más lentas (incluso por debajo de 0,1 pies/s), el error de medición aumenta, pero las lecturas siguen siendo repetibles. Es importante que la conductividad del fluido de proceso sea uniforme. Si se mezclan dos fluidos y la conductividad de uno de los aditivos es significativamente diferente de la del otro fluido del proceso, es importante que se mezclen completamente antes de que la mezcla llegue al medidor magnético. Si la mezcla no es uniforme, la señal de salida será ruidosa. Para evitarlo, se pueden eliminar las bolsas de conductividad variable
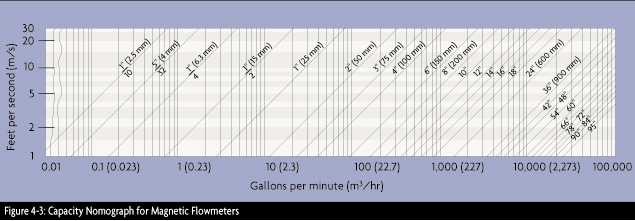
 pulgadas. instalando un mezclador estático aguas arriba del medidor magnético. El tamaño del medidor magnético se determina mediante tablas o gráficos de capacidad publicados por el Fabricante. La figura 4-3 proporciona un nomograma de capacidad de flujo para tamaños de línea de 0,1 pulgadas a 96
pulgadas. instalando un mezclador estático aguas arriba del medidor magnético. El tamaño del medidor magnético se determina mediante tablas o gráficos de capacidad publicados por el Fabricante. La figura 4-3 proporciona un nomograma de capacidad de flujo para tamaños de línea de 0,1 pulgadas a 96
Para la mayoría
de las aplicaciones, las velocidades de flujo deben estar entre 3 pies/s y 15 pies/s. Para fluidos corrosivos, el rango de velocidad normal debe ser de 3 a 6 pies/s. Si el tubo de flujo funciona continuamente por debajo de 3 pies/segundo, la precisión de la medición se deteriorará, mientras que el funcionamiento continuo por encima del límite superior del rango de velocidad normal acortará la vida útil del medidor. La naturaleza sin obstrucciones del medidor magnético reduce la probabilidad de obstrucción y limita la
pérdida de carga no recuperada a la de una longitud equivalente de tubería recta. La baja caída de presión es deseable porque reduce los costos de bombeo y ayuda a los sistemas de alimentación por gravedad. El medidor magnético no puede distinguir el aire arrastrado del fluido de proceso; por lo tanto, las burbujas de aire harán que el medidor magnético lea valores altos. Si el aire atrapado no se dispersa
de manera homogénea, sino que toma la forma de burbujas de aire grandes (del tamaño del electrodo), esto hará que la señal de salida sea ruidosa o incluso la interrumpa. Por lo tanto, en aplicaciones en las que es probable que se produzca arrastre de aire, el medidor debe dimensionarse de manera que la velocidad del flujo en condiciones normales sea de 6 a 12 pies/s. El recubrimiento de los
electrodos es otro problema común de los medidores magnéticos. La acumulación de material en las superficies internas del medidor puede aislar eléctricamente los electrodos del fluido de proceso. Esto puede provocar una pérdida de señal o un error de medición, ya sea al cambiar el diámetro del tubo de flujo o al provocar cambios en el intervalo y el cero. Naturalmente, la mejor solución es la prevención. Una medida preventiva consiste en dimensionar el medidor de manera que, en condiciones
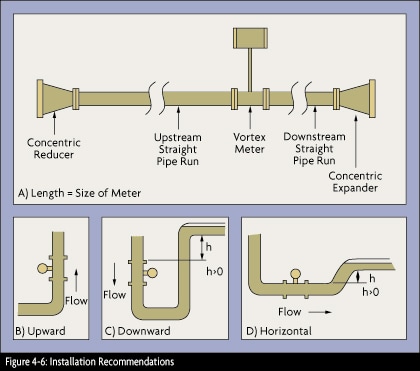
normales de flujo, la velocidad de flujo sea relativamente alta: al menos 6-12 pies/s, o tan alta como sea posible teniendo en cuenta la posibilidad de erosión y corrosión. Otro método de prevención consiste en utilizar electrodos que sobresalgan en la corriente de flujo para aprovechar la turbulencia y el efecto de lavado. En condiciones de servicio más severas, se puede instalar un sistema de limpieza mecánica y utilizarlo de forma intermitente o continua para eliminar los recubrimientos y las acumulaciones. Figura 4-4 Instalación El caudalímetro magnético debe estar siempre lleno de líquido. Por lo tanto, la ubicación preferida para los caudalímetros magnéticos es en líneas de flujo verticales ascendentes. La instalación en líneas
 bajo, debe horizontales es aceptable si la sección de la tubería se encuentra en un punto bajo y si los electrodos no están en la parte superior de la tubería. Esto evita que el aire entre en contacto con los electrodos. Cuando el fluido de proceso es un lodo y el medidor magnético está instalado en un punto
bajo, debe horizontales es aceptable si la sección de la tubería se encuentra en un punto bajo y si los electrodos no están en la parte superior de la tubería. Esto evita que el aire entre en contacto con los electrodos. Cuando el fluido de proceso es un lodo y el medidor magnético está instalado en un punto
retirarse durante
los periodos de parada prolongados, para que los sólidos no se depositen y recubran el interior. Si es esencial drenar el medidor magnético periódicamente, debe disponer de una opción de tubo vacío cero. Cuando se activa esta opción, la salida del transmisor se fija en cero. La detección de condiciones de tubo vacío se realiza mediante circuitos conectados a juegos adicionales de electrodos en el tubo de flujo. La función de cero de tubo vacío también se puede activar mediante un contacto externo, como un contacto de estado de la bomba. Los medidores
magnéticos requieren cinco diámetros de tubería recta aguas arriba y dos diámetros aguas abajo para mantener su precisión y minimizar el desgaste del revestimiento. Hay protectores de revestimiento disponibles para proteger el borde delantero de los revestimientos de los efectos abrasivos de los fluidos de proceso. Si el medidor magnético se instala en una tubería
horizontal que exceda los 30 pies de longitud, la tubería debe estar apoyada a ambos lados del medidor. El caudalímetro magnético debe estar conectado eléctricamente a tierra con el líquido de proceso. Esto se debe a que el medidor magnético forma parte de la trayectoria de cualquier corriente parásita que recorra la tubería o atraviese el líquido de proceso. La conexión, mediante la conexión a tierra del medidor en ambos extremos al fluido de proceso, proporciona un cortocircuito para las corrientes parásitas, desviándolas
alrededor del tubo
de flujo en lugar de a través de él. Si el sistema no está correctamente conectado a tierra, estas corrientes pueden crear un desplazamiento del cero en la salida del caudalímetro magnético. La conexión eléctrica al fluido de proceso se puede lograr mediante correas metálicas de conexión a tierra. Estas correas conectan cada extremo del tubo de flujo a las bridas adyacentes de la tubería, que, a su vez, están en contacto con el líquido de proceso. Las correas se utilizan cuando la tubería es conductiva. Cuando el tubo no es conductivo o
está revestido, se utilizan anillos de conexión a tierra. El anillo de conexión a tierra es similar a una placa de orificio con un diámetro interior igual al tamaño nominal (diámetro interior) del tubo de flujo. Se instala entre las bridas del tubo de flujo y las tuberías de proceso adyacentes en los lados aguas arriba y aguas abajo. El tubo de flujo está conectado al fluido de proceso mediante los anillos de conexión a tierra metálicos y está conectado a tierra mediante cables a un buen conductor, como un tubo de agua fría. En tamaños más grandes y en materiales exóticos, los anillos de conexión a tierra pueden resultar caros; en su lugar, se pueden utilizar electrodos de conexión a
 fluido forma tierra (un tercer electrodo colocado en el tubo de flujo para unirse al fluido del proceso). Otra opción económica es utilizar un anillo de conexión a tierra de plástico con un inserto de electrodo metálico. Figura 4-5 Caudalímetros de vórtices Cuando era joven y pescaba en los arroyos de montaña de los Alpes de Transilvania, Theodor von Karman descubrió que, cuando se coloca un objeto no aerodinámico (también llamado cuerpo romo) se coloca en el camino de un arroyo de corriente rápida, el fluido se separa alternativamente del objeto en sus dos lados aguas abajo y, a medida que la capa límite se desprende y se curva sobre sí misma, el
fluido forma tierra (un tercer electrodo colocado en el tubo de flujo para unirse al fluido del proceso). Otra opción económica es utilizar un anillo de conexión a tierra de plástico con un inserto de electrodo metálico. Figura 4-5 Caudalímetros de vórtices Cuando era joven y pescaba en los arroyos de montaña de los Alpes de Transilvania, Theodor von Karman descubrió que, cuando se coloca un objeto no aerodinámico (también llamado cuerpo romo) se coloca en el camino de un arroyo de corriente rápida, el fluido se separa alternativamente del objeto en sus dos lados aguas abajo y, a medida que la capa límite se desprende y se curva sobre sí misma, el
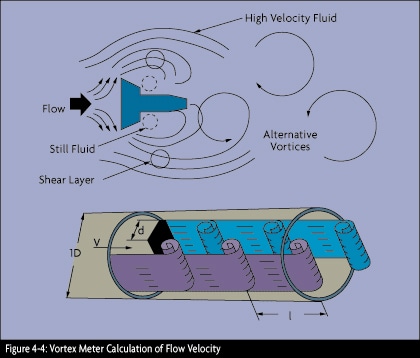
vórtices (también llamados remolinos o torbellinos). También observó que la distancia entre los vórtices era constante y dependía únicamente del tamaño de la roca que los formaba. En el lado del cuerpo romo donde se forma el vórtice, la velocidad del fluido es mayor y la presión es baja. A medida que el vórtice se desplaza río abajo, aumenta su fuerza y tamaño, y finalmente se desprende o se separa. A continuación, se forma un vórtice en el otro lado del cuerpo romo (Figura 4-4). Los vórtices alternos están espaciados a distancias iguales. El fenómeno de
desprendimiento de vórtices
se puede observar al viento se desprende de un mástil (que actúa como un cuerpo romo); esto es lo que provoca el ondulado regular que se ve en una bandera. Los vórtices también se desprenden de los pilares de los puentes, los pilotes, los soportes de las plataformas de perforación marinas y los edificios altos. Las fuerzas causadas por el fenómeno de desprendimiento de
vórtices
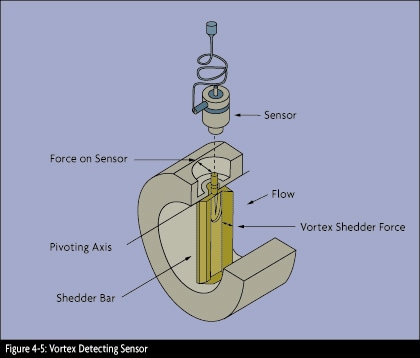
deben tenerse en cuenta al diseñar estas estructuras. En un sistema de tuberías cerrado, el efecto vórtice se disipa a pocos diámetros de tubería aguas abajo del cuerpo romo y no causa ningún daño. Diseño del medidor de vórtice Un medidor de flujo de vórtice suele estar fabricado en acero inoxidable 316 o Hastelloy e incluye un cuerpo romo, un conjunto de sensores de vórtice y la electrónica del transmisor, aunque esta última también puede montarse de forma remota (Figura 4-5). Suelen estar disponibles en tamaños de brida de 1/2 pulgada a 12 pulgadas. El coste de instalación de los medidores de vórtices es competitivo con
el de los medidores de orificio en tamaños inferiores a seis pulgadas. Los medidores con cuerpo tipo oblea (sin brida) son los más
económicos, mientras que
los medidores con brida son los preferidos si el fluido del proceso es peligroso o está a alta temperatura. Se han experimentado con formas (cuadradas, rectangulares,
en forma
de T, trapezoidales) y dimensiones de cuerpos romos para conseguir las características deseadas. Las pruebas han demostrado que la linealidad, la limitación del bajo número de Reynolds y la sensibilidad a la distorsión del perfil de velocidad varían solo ligeramente con la forma del cuerpo romo. En cuanto al tamaño, el cuerpo romo debe tener una anchura que sea una fracción suficientemente grande del diámetro de la tubería para que todo el flujo participe en el desprendimiento. En segundo lugar, el cuerpo romo debe tener bordes salientes en la
cara aguas arriba para fijar las líneas de separación del flujo, independientemente del Caudal. En tercer lugar, la longitud del cuerpo romo en la dirección del flujo debe ser un múltiplo determinado de la anchura del cuerpo romo. Hoy en día, la mayoría de los medidores de vórtice utilizan sensores piezoeléctricos o de capacitancia para detectar la oscilación de presión alrededor del cuerpo romo.
 situados dentro Estos detectores responden a la oscilación de presión con una señal de salida de bajo voltaje que tiene la misma frecuencia que la oscilación. Dichos sensores son modulares, económicos, fáciles de reemplazar y pueden funcionar en un amplio rango de temperaturas, desde líquidos criogénicos hasta vapor sobrecalentado. Los sensores pueden estar
situados dentro Estos detectores responden a la oscilación de presión con una señal de salida de bajo voltaje que tiene la misma frecuencia que la oscilación. Dichos sensores son modulares, económicos, fáciles de reemplazar y pueden funcionar en un amplio rango de temperaturas, desde líquidos criogénicos hasta vapor sobrecalentado. Los sensores pueden estar
del cuerpo del medidor o fuera de él. Los sensores mojados están sometidos directamente a las fluctuaciones de presión del vórtice y están encerrados en cajas endurecidas para resistir los efectos de la corrosión y la erosión. Imagen 4-6 Los sensores externos, normalmente galgas extensométricas piezoeléctricas, detectan el desprendimiento de vórtices indirectamente a través de la fuerza ejercida sobre la barra desprendedora. Los sensores externos son preferibles en aplicaciones altamente
erosivas/corrosivas para reducir los costes de mantenimiento, mientras que los sensores internos proporcionan una mejor capacidad de rango (mejor sensibilidad a bajos caudales). También son menos sensibles a las vibraciones de los tubos. La carcasa de los componentes electrónicos suele estar clasificada como resistente a explosiones y a la intemperie, y contiene el módulo transmisor electrónico,
las conexiones de
terminación y, opcionalmente, un indicador de caudal y/o un totalizador. Dimensionamiento y capacidad de variación La frecuencia de desprendimiento de vórtices es directamente proporcional a la velocidad del fluido en la tubería y, por lo tanto, al caudal volumétrico. La frecuencia de desprendimiento es independiente de las propiedades del fluido, como la densidad, la viscosidad, la Conductividad, etc., excepto que el
flujo debe ser turbulento para que se produzca el desprendimiento de vórtices. La relación entre la frecuencia de los vórtices y la velocidad del fluido es: St = f(d/V) Donde St es el número de Strouhal, f es la
frecuencia de desprendimiento de vórtices, d es la anchura del cuerpo romo y V es la velocidad media del fluido. El valor del número de Strouhal se determina experimentalmente y, por lo general, se considera constante en un amplio rango de números de Reynolds. El número de Strouhal representa la relación entre el intervalo entre la separación de vórtices (l) y la anchura del cuerpo romo (d), que es de acerca de seis (Figura 4-4). El número de Strouhal es un factor de calibración adimensional que se utiliza para caracterizar diversos cuerpos romos.
Si su número de
Strouhal es el mismo, dos cuerpos romos diferentes se comportarán de manera similar. Dado que el caudal volumétrico Q es el producto de la velocidad media del fluido y del área transversal disponible para el flujo (A): Q = AV = (A f d B)/St donde B es el factor de obstrucción, definido como el área abierta que deja el cuerpo romo dividida por el área total del paso de la tubería. Esta
ecuación, a su vez, se puede reescribir como: Q = fK donde K es el coeficiente del medidor, igual al producto (A f d B). Al igual que con los caudalímetros de turbina y otros medidores que producen frecuencia, el factor K se puede definir como pulsos por unidad de volumen (pulsos por galón,
pulsos por pie cúbico, etc.). Por lo tanto, se puede determinar el caudal contando los pulsos por unidad de tiempo. Las frecuencias de vórtice oscilan entre uno y miles de pulsos por segundo, dependiendo de la velocidad del flujo, las características del fluido del proceso y el tamaño
del medidor. En el servicio de gas, las frecuencias son aproximadamente 10 veces más altas que en las aplicaciones de líquidos. El factor K lo determina el fabricante, normalmente mediante una calibración con agua en un laboratorio de caudal. Dado que el factor K es el mismo para aplicaciones con líquidos, gases y vapores, el valor determinado a partir de una calibración con agua es válido para cualquier otro fluido. El factor de calibración (K) a números de Reynolds moderados no es sensible a la nitidez de los bordes ni a otros
cambios dimensionales que
afectan a los medidores de orificio de bordes cuadrados. Aunque las ecuaciones de los medidores de vórtices son relativamente sencillas en comparación con las de las placas de orificio, hay muchas reglas y consideraciones que hay que tener en cuenta. Los fabricantes ofrecen software gratuito para el dimensionamiento,
en el que el usuario introduce las propiedades del fluido (densidad, viscosidad y rango de caudal deseado) y el programa dimensiona automáticamente el medidor. Figura 4-7 La fuerza generada por el pulso de presión del vórtice es una función de la densidad del fluido multiplicada por el cuadrado de la velocidad del fluido. El requisito de que haya un flujo turbulento y una fuerza suficiente
para accionar el sensor determina el rango de medición del medidor. Esta fuerza debe ser lo suficientemente alta como para distinguirse del ruido. Por ejemplo, un medidor de vórtices típico de 2 pulgadas tiene un rango de flujo de agua de 12 a 230 gpm. Si la densidad o la viscosidad del fluido difiere de la del agua, el rango del medidor cambiará. Para minimizar el ruido de medición, es importante seleccionar un medidor que maneje adecuadamente tanto los caudales mínimos como los máximos del proceso que se van a medir. Se recomienda que el caudal mínimo que se va a medir
sea al menos el doble del caudal mínimo detectable por el medidor. La capacidad máxima del medidor debe ser al menos cinco veces el caudal máximo previsto. Precisión y rango Dado que el número de Reynolds disminuye a medida que aumenta la viscosidad, el rango del caudalímetro de vórtices se ve afectado a medida que aumenta la viscosidad. El límite máximo de viscosidad, en función de la precisión y el rango permitidos, está entre 8 y 30 centipoises. Aplicaciones: Líquido/Aplicación Con números de Reynolds inferiores a 10 000, el error puede alcanzar el 10 % del caudal real. Mientras que la mayoría de los caudalímetros siguen dando alguna indicación con caudales cercanos a cero, el medidor de vórtices cuenta con un punto de
 ayudar en corte. Por debajo de este nivel, la salida del medidor se fija automáticamente en cero (4 mA para transmisores analógicos). Este punto de corte corresponde a un número de Reynolds igual o inferior a 10 000. Si el caudal mínimo que se necesita medir es al menos el doble del caudal de corte, esto no supone ningún problema. Por otro lado, puede seguir siendo un inconveniente si se desea obtener información sobre el caudal bajo durante el arranque, la parada u otras condiciones de perturbación. Los transmisores inteligentes también están provistos de subrutinas de diagnóstico para señalar fallos en los componentes u otros fallos. Los transmisores inteligentes pueden iniciar rutinas de prueba para identificar problemas tanto con el medidor como con la aplicación. Estas pruebas bajo demanda también pueden
ayudar en corte. Por debajo de este nivel, la salida del medidor se fija automáticamente en cero (4 mA para transmisores analógicos). Este punto de corte corresponde a un número de Reynolds igual o inferior a 10 000. Si el caudal mínimo que se necesita medir es al menos el doble del caudal de corte, esto no supone ningún problema. Por otro lado, puede seguir siendo un inconveniente si se desea obtener información sobre el caudal bajo durante el arranque, la parada u otras condiciones de perturbación. Los transmisores inteligentes también están provistos de subrutinas de diagnóstico para señalar fallos en los componentes u otros fallos. Los transmisores inteligentes pueden iniciar rutinas de prueba para identificar problemas tanto con el medidor como con la aplicación. Estas pruebas bajo demanda también pueden
la verificación de la norma ISO 9000. Algunos caudalímetros másicos introducidos recie
- Caudalímetros magnéticos
- Excitación del medidor magnético
- Tubos de flujo, revestimientos y Sondas
- Electrodos
- Desarrollos recientes
- Selección y dimensionamiento
- Aplicaciones problemáticas
- Instalación
- Caudalímetros de vórtices
- Diseño de medidores de vórtices
- Dimensionamiento y rango de medición
- Precisión y rango de medición
- Desarrollos recientes
- Aplicaciones y limitaciones
- Recomendaciones de instalación
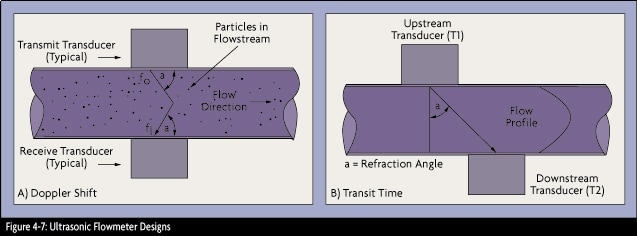
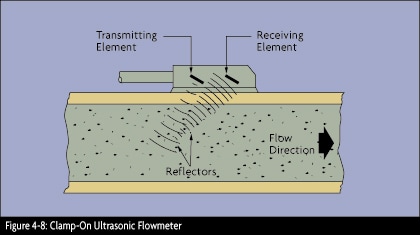
- Caudalímetros ultrasónicos
- El efecto Doppler
- Medición del tiempo de tránsito
- Variaciones de diseño
- Aplicaciones y Rendimiento



¿Qué es un anemómetro y qué mide? Introducción a la medición de la velocidad del aire