Le contrôle proportionnel intégral dérivé (PID) est une méthode bien établie pour amener un système vers une position ou un niveau cible. Il est pratiquement omniprésent comme moyen de contrôle de la température et trouve des applications dans une multitude de processus chimiques et scientifiques ainsi que dans l'automatisation.
Le contrôle PID n'est toutefois pas sans poser de problèmes. Il peut donner des résultats moins qu'idéaux dans les situations où la valeur cible change, que ce soit sous la forme d'une fonction échelon ou dans le cadre d'un profil « ramp & soak ».
 Contrôleurs de température et de processus série PLATINUM
Contrôleurs de température et de processus série PLATINUM Dans le but d'améliorer les performances, certains fabricants d'instruments explorent l'intérêt d'utiliser la « logique floue » pour le contrôle des processus. Ce livre blanc d'OMEGA Engineering explore à la fois les faiblesses des systèmes PID et les avantages potentiels de la logique floue, en se référant particulièrement aux problèmes liés au contrôle de la température. Les différentes sections traitent des thèmes suivants :
- Les défis du PID
- Présentation de la logique floue pour le contrôle
- PID et logique floue adaptative
- Applications
Les défis du PID
Les mathématiques utilisées dans une équation de contrôle PID sont complexes, avec de multiples variables et constantes qui interagissent. Dans toute application donnée, celles-ci sont sélectionnées pour suivre la valeur cible aussi étroitement que possible, dans les limites imposées par le processus lui-même et l'instrumentation.
Trois problèmes communs à presque toutes les applications de contrôle de processus sont :
- Les retards ou décalages temporels
- La réponse à une fonction échelon
- La réponse à une fonction « rampe et maintien »
 Démonstrateur de contrôleur PID série PLATINUM
Démonstrateur de contrôleur PID série PLATINUM Dans de nombreuses situations, la sortie peut prendre beaucoup de temps, voire varier, pour réagir aux changements d'entrée. Par exemple, un four refroidit lorsqu'il est « chargé » avec du métal nouveau et peut mettre plusieurs minutes à revenir à la température souhaitée. Cela peut entraîner des dépassements de température susceptibles d'endommager le contenu. À l'inverse, le chauffage peut être trop lent, ce qui réduit l'efficacité du processus et a des effets néfastes sur le produit ou le matériau.
Lors de la modification instantanée de la valeur cible, le PID oblige le système à appliquer un facteur de correction important, ce qui peut à nouveau entraîner un dépassement. À l'inverse, le système peut devenir saturé, incapable d'apporter une correction suffisante, ce qui ajoute à l'impact du terme « I ».
Ces problèmes se produisent également dans les situations de « rampe et maintien » où la température est augmentée progressivement puis maintenue. Le suivi d'un changement progressif de la valeur de consigne peut poser des difficultés aux systèmes de contrôle PID.
Par conséquent, la sélection des valeurs optimales est un processus d'essais et d'erreurs appelé « réglage ». Au fil des ans, de nombreuses approches de réglage ont été développées, dont la plus satisfaisante semble être la méthode « Ziegler Nichols ». Cependant, celle-ci produit des niveaux d'oscillation élevés, ce qui peut poser problème dans certaines situations.
Présentation du contrôle par logique floue
Le calcul conventionnel est basé sur la logique booléenne, ce qui signifie que tout est représenté par un zéro ou un un. Dans certaines situations, cela conduit à une simplification excessive et à des résultats inadéquats. La logique floue, et par extension, le contrôle flou, cherchent à traiter la complexité en créant des heuristiques qui correspondent davantage à la perception humaine des problèmes.
La logique floue est un domaine particulier de l'étude de l'intelligence artificielle et repose sur la valeur des informations qui ne sont ni définitivement vraies ni définitivement fausses. Les informations que les humains utilisent dans leur vie quotidienne pour fonder leurs décisions intuitives et appliquer des règles générales peuvent et doivent être appliquées aux situations de contrôle qui les exigent. Les connaissances acquises peuvent être une arme puissante pour lutter contre les effets indésirables de la réponse du système.
La logique floue offre un moyen de gérer l'imprécision et la non-linéarité dans des situations de contrôle complexes. Les entrées sont transmises à un « moteur d'inférence » où des règles humaines ou basées sur l'expérience sont appliquées pour produire une sortie.
PID Plus Adaptive Fuzzy Logic
Le réglage des boucles PID dépend de l'heuristique, mais aboutit souvent à un résultat sous-optimal. La logique floue offre une alternative aux approches telles que Ziegler Nichols, et un nombre croissant de recherches suggèrent qu'elle donne des résultats supérieurs. Il semblerait donc qu'un contrôleur PID réglé avec la logique floue soit le moyen idéal pour contrôler de nombreux processus complexes.
La série OMEGA® Platinum de régulateurs de température et de processus est un produit disponible dans le commerce qui intègre une telle approche. Cette gamme de régulateurs PID compacts à microprocesseur, disponibles en trois tailles DIN, est conçue pour être facile à configurer et à utiliser. Tous les thermocouples et RTD courants peuvent être connectés, le système activant automatiquement uniquement les fonctions pertinentes pour le type d'entrée sélectionné. Des entrées de tension et de courant sont également disponibles, ce qui permet de les utiliser avec presque toutes les unités techniques. Ces contrôleurs offrent une solution PID complète, prenant en charge des programmes complexes avec jusqu'à 16 séquences Ramp & Soak. L'auto-réglage est disponible pour les applications PID avec logique floue adaptative afin d'aider à obtenir des résultats optimaux.
Comment fonctionnent les programmes de logique floue ?
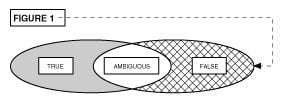
Les logiciels de contrôle utilisant des programmes flous utilisent un ensemble très flexible de règles « si-alors ». La solution est ensuite appliquée aux fonctions d'appartenance appropriées. En se référant à la Figure 1, les valeurs qui se trouvent dans la zone ombrée sont considérées comme vraies sans l'ombre d'un doute. Les valeurs qui se trouvent dans la zone hachurée sont considérées comme fausses sans l'ombre d'un doute. Si toutes les données se trouvent d'un côté ou de l'autre de la zone de chevauchement, la logique floue n'aura probablement que peu d'intérêt.
Dans la plupart des applications, certains points se trouvent dans la zone commune. Les informations qui se trouvent dans la zone commune doivent être étudiées, stockées et utilisées pour quantifier et classer les données. Cela permet une manipulation intelligente de la structure des données afin de déduire une solution. Les informations qui se trouvent dans cette zone commune peuvent être classées, datées et « estimées » après évaluation de ces informations « grises ».
Un autre avantage de la logique floue dans un système de contrôle est de quantifier le signal d'entrée dans un environnement parfois « bruyant ». Ce bruit, qui tend à corrompre l'intégrité du signal réel, est traité grâce au bon sens de l'opérateur compétent.
 Mathématiquement, les informations doivent être évaluées et préparées pour être utilisées dans la prise de décision. Si un opérateur prenait le temps de tracer les informations du processus sur un système de coordonnées X-Y, il pourrait appliquer visuellement un ajustement de courbe aux données et obtenir une représentation générique assez précise.
Mathématiquement, les informations doivent être évaluées et préparées pour être utilisées dans la prise de décision. Si un opérateur prenait le temps de tracer les informations du processus sur un système de coordonnées X-Y, il pourrait appliquer visuellement un ajustement de courbe aux données et obtenir une représentation générique assez précise.
Mathématiquement, l'ajustement d'une courbe d'ordre inférieur produirait une représentation assez imprécise. Par conséquent, une courbe d'ajustement d'ordre supérieur serait appropriée pour tenir compte du signal bruité. La logique floue tente d'imiter la réponse humaine et d'appliquer l'ajustement le plus intelligent aux données.
Théorie de contrôle de Ziegler-Nichols
La théorie de contrôle de Ziegler-Nichols fournit des nombres PID (proportionnels, intégraux et dérivés) qui facilitent le fonctionnement des contrôles. Le développement du contrôle PID à microprocesseur peu coûteux a remplacé la majorité des dispositifs de type thermostat (Activé/Désactivé). La plupart des contrôleurs à microprocesseur disposent d'une fonction d'autoréglage qui fait fonctionner un système expérimental comme le montre la figure 2. Cette expérience permet de déterminer les caractéristiques thermiques d'un système particulier. Dans la plupart des cas, la méthode d'autoréglage consiste à effectuer une entrée par paliers dans l'élément de contrôle final et à surveiller la sortie. Cela produit un terme de gain directement lié à la bande proportionnelle. Le temps de retard entre l'application de l'entrée par paliers et la réponse observée influence le nombre dérivé.
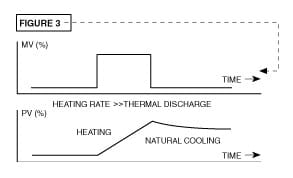
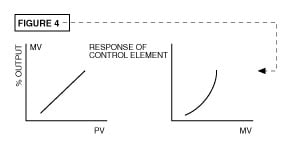
La plupart des contrôleurs à microprocesseur disposent d'une fonction d'autoréglage qui fait fonctionner un système expérimental comme le montre la figure 2. Cette expérience permet de déterminer les caractéristiques thermiques d'un système particulier. Dans la plupart des cas, la méthode d'autoréglage consiste à effectuer une entrée par paliers dans l'élément de contrôle final et à surveiller la sortie. Cela produit un terme de gain directement lié à la bande proportionnelle. Le temps de retard entre l'application de l'entrée par paliers et la réponse observée influence le nombre dérivé. Le temps de montée de la réponse à l'entrée par paliers produit une valeur qui sera utilisée dans l'intégration. Dans certains systèmes, le délai nécessaire pour produire une réponse est très différent du temps nécessaire pour évacuer la chaleur, comme le montre la figure 3. Ceci est courant dans de nombreuses applications d'extrusion, ce qui rend l'approche Fuzzy Logic très avantageuse. Si la réponse de l'élément de contrôle final, comme le montre la figure 4, est non linéaire, pour quelque raison que ce soit, une réponse linéaire provenant uniquement de l'action de proportionnement donnerait un contrôle moins qu'acceptable.
 De plus, si le système a tendance à présenter des propriétés thermiques variables ou certaines irrégularités thermiques, le contrôle par logique floue devrait offrir une meilleure alternative à l'ajustement constant des paramètres PID.
De plus, si le système a tendance à présenter des propriétés thermiques variables ou certaines irrégularités thermiques, le contrôle par logique floue devrait offrir une meilleure alternative à l'ajustement constant des paramètres PID. La plupart des logiciels de logique floue commencent à construire leur base d'informations pendant la fonction d'autoréglage. En fait, la majorité des informations utilisées dans les premières étapes du démarrage du système proviennent des solutions d'autoréglage.
Applications
Il existe actuellement de nombreuses applications de la logique floue utilisées par les appareils ménagers courants, des produits que la plupart des gens connaissent bien. L'avantage de la logique floue devient évident pour l'utilisateur d'appareils grand public, car le module ou la fonction floue est intégré dans le produit.
L'avantage de cette approche est qu'elle évite à l'opérateur d'avoir à comprendre la théorie du fonctionnement flou. Le fonctionnement ne nécessite que l'application de connaissances courantes aux paramètres standard.
À moins que le contrôle en boucle ouverte soit acceptable, presque toutes les applications de contrôle de processus tireraient profit du contrôle PID.
Unless open-loop control is acceptable, almost every process control application would benefit from PID control. En termes de contrôle de la température, voici quelques bons exemples :
- Traitement thermique des métaux. Les séquences « Ramp & Soak » nécessitent un contrôle précis pour garantir l'obtention des propriétés métallurgiques souhaitées.
- Séchage/évaporation des solvants des surfaces peintes. Une température trop élevée peut endommager les substrats, tandis qu'une température trop basse peut endommager le produit et nuire à son apparence.
- Le durcissement du caoutchouc. Un contrôle précis de la température garantit un durcissement complet sans nuire aux propriétés du matériau.
- La cuisson. Les fours commerciaux doivent suivre des séquences de chauffage et de refroidissement strictement prescrites pour garantir que les réactions nécessaires se produisent.
- La céramique. Les fours continus doivent fournir des niveaux de chaleur élevés tout en étant soumis à des charges thermiques variables. Cela en fait une application idéale pour le contrôle PID.
 Traitement thermique des métaux...
Traitement thermique des métaux...  Installation de boulangerie industrielle
Installation de boulangerie industrielle Points clés à retenir
Le contrôle en boucle fermée vise à maintenir le rendement réel d'un processus aussi proche que possible du rendement cible ou de consigne.
Le contrôle PID est une méthode éprouvée pour assurer ce contrôle, mais il nécessite un réglage pour obtenir des performances optimales. Ce réglage est complexe et difficile, c'est pourquoi on utilise généralement des techniques heuristiques, telles que la méthode Ziegler Nichols.
Les processus nécessitant un changement progressif ou un contrôle « Ramp & Soak » sont particulièrement difficiles à gérer avec les techniques PID conventionnelles. Pour remédier à cela, les fabricants de contrôleurs tels qu'OMEGA intègrent des capacités de réglage automatique basées sur la logique floue. Des techniques de calcul avancées sont utilisées pour aider à optimiser les boucles PID et améliorer les niveaux de contrôle des processus.


Qu'est-ce qu'un thermoplongeur ? Types d'éléments chauffants à immersion Qu'est-ce qu'un thermoplongeur ?

Qu'est-ce qu'un chauffage électrique industriel ? Qu'est-ce qu'un appareil de chauffage industriel ?