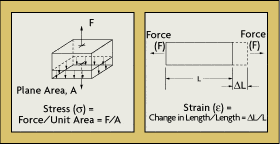
Al aplicar fuerzas externas a un objeto estacionario, se producen tensiones y deformaciones. La tensión se define como las fuerzas de resistencia internas del objeto, y la deformación se define como el desplazamiento y la deformación que se producen. Para una distribución uniforme de las fuerzas de resistencia internas, la tensión se puede calcular (Figura 2-1) dividiendo la fuerza (F) aplicada por la unidad de área (A):
 Título de la leyenda de la imagen
Título de la leyenda de la imagen Unidades de deformación
La deformación se define como la cantidad de deformación por unidad de longitud de un objeto cuando se aplica una carga. La deformación se calcula dividiendo la deformación total de la longitud original por la longitud original (L):
 Título de la leyenda de la imagen
Título de la leyenda de la imagen
Los valores típicos de la deformación son inferiores a 0,005 pulgadas/pulgada y a menudo se expresan en unidades de microdeformación:
 Título de la leyenda de la imagen
Título de la leyenda de la imagen
La deformación puede ser compresiva o tensional y se mide normalmente con galgas extensométricas. Fue Lord Kelvin quien informó por primera vez en 1856 que los conductores metálicos sometidos a deformación mecánica muestran un cambio en su resistencia eléctrica. Este fenómeno se utilizó por primera vez de forma práctica en la década de 1930.
 Título de la leyenda de la imagen
Título de la leyenda de la imagen
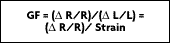
Básicamente, todas las galgas extensométricas están diseñadas para convertir el movimiento mecánico en una señal electrónica. Un cambio en la capacitancia, la inductancia o la resistencia es proporcional a la tensión experimentada por el sensor. Si un cable se mantiene bajo tensión, se alarga ligeramente y se reduce su área transversal. Esto cambia su resistencia (R) en proporción a la sensibilidad a la deformación (S) de la resistencia del cable. Cuando se introduce una deformación, la sensibilidad a la deformación, también llamada factor de medición (GF), viene dada por:
 Título de la leyenda de la imagen
Título de la leyenda de la imagen
El sensor de deformación ideal cambiaría la resistencia solo debido a las deformaciones de la superficie a la que está conectado el sensor. Sin embargo, en aplicaciones reales, la temperatura, las propiedades del material, el adhesivo que une el medidor a la superficie y la estabilidad del metal afectan a la resistencia detectada. Dado que la mayoría de los materiales no tienen las mismas propiedades en todas las direcciones, el conocimiento de la deformación axial por sí solo es insuficiente para un análisis completo. También es necesario medir las deformaciones de Poisson, flexión y torsión. Cada una de ellas requiere una disposición diferente de las galgas extensométricas.
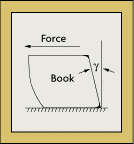 Título de la leyenda de la imagen La deformación por cizallamiento tiene en cuenta la distorsión angular de un objeto sometido a tensión. Imagine que una fuerza horizontal actúa sobre la esquina superior derecha de un libro grueso sobre una mesa, lo que obliga al libro a adoptar una forma algo trapezoidal (Figura 2-2). La deformación por cizallamiento en este caso puede expresarse como el cambio angular en radianes entre el eje y vertical y la nueva posición. La deformación por cizallamiento es la tangente de este ángulo.
Título de la leyenda de la imagen La deformación por cizallamiento tiene en cuenta la distorsión angular de un objeto sometido a tensión. Imagine que una fuerza horizontal actúa sobre la esquina superior derecha de un libro grueso sobre una mesa, lo que obliga al libro a adoptar una forma algo trapezoidal (Figura 2-2). La deformación por cizallamiento en este caso puede expresarse como el cambio angular en radianes entre el eje y vertical y la nueva posición. La deformación por cizallamiento es la tangente de este ángulo.
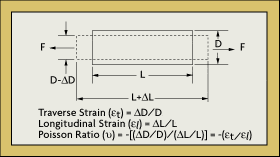
La deformación de Poisson expresa tanto el adelgazamiento como el alargamiento que se produce en una barra sometida a tensión (Figura 2-3). La deformación de Poisson se define como la relación negativa entre la deformación en la dirección transversal (causada por la contracción del diámetro de la barra) y la deformación en la dirección longitudinal. A medida que aumenta la longitud y disminuye el área de la sección transversal, también aumenta la resistencia eléctrica del cable.
 Título de la leyenda de la imagen La deformación por flexión, o deformación por momento, se calcula determinando la relación entre la fuerza y la cantidad de flexión que resulta de ella. Aunque no se detecta tan comúnmente como los otros tipos de deformación, la deformación por torsión se mide cuando interesa la deformación producida por la torsión. La deformación torsional se calcula dividiendo la tensión torsional por el módulo de elasticidad torsional.
Título de la leyenda de la imagen La deformación por flexión, o deformación por momento, se calcula determinando la relación entre la fuerza y la cantidad de flexión que resulta de ella. Aunque no se detecta tan comúnmente como los otros tipos de deformación, la deformación por torsión se mide cuando interesa la deformación producida por la torsión. La deformación torsional se calcula dividiendo la tensión torsional por el módulo de elasticidad torsional.
Diseños de sensores
La deformación de un objeto se puede medir por medios mecánicos, ópticos, acústicos, neumáticos y eléctricos. Los primeros sensores de deformación eran dispositivos mecánicos que medían la deformación midiendo el cambio de longitud y comparándolo con la longitud original del objeto. Por ejemplo, el medidor de extensión (extensiómetro) utiliza una serie de palancas para amplificar la deformación hasta un valor legible. Sin embargo, en general, los dispositivos mecánicos tienden a proporcionar bajas resoluciones y son voluminosos y difíciles de usar.
 Título de la leyenda de la imagen
Título de la leyenda de la imagen
Optical sensors are sensitive and accurate, but are delicate and not very popular in industrial applications. They use interference fringes produced by optical flats to measure strain. Optical sensors operate best under laboratory conditions.
Los sensores ópticos son sensibles y precisos, pero son delicados y no muy populares en aplicaciones industriales. Utilizan franjas de interferencia producidas por planos ópticos para medir la deformación. Los sensores ópticos funcionan mejor en condiciones de laboratorio. La característica más utilizada que varía en proporción a la deformación es la resistencia eléctrica. Aunque se han construido galgas extensométricas basadas en la capacitancia y la inductancia, la sensibilidad de estos dispositivos a las vibraciones, sus requisitos de montaje y la complejidad de los circuitos han limitado su aplicación. El medidor fotoeléctrico utiliza un haz de luz, dos rejillas finas y un detector de fotocélulas para generar una corriente eléctrica proporcional a la deformación. La longitud de medición de estos dispositivos puede ser tan corta como 1/16 de pulgada, pero son costosos y delicados.
Al seleccionar un medidor de deformación, se deben tener en cuenta no solo las características de deformación del sensor, sino también su estabilidad y sensibilidad a la temperatura. Desafortunadamente, los materiales más deseables para los medidores de deformación también son sensibles a las variaciones de temperatura y tienden a cambiar su resistencia a medida que envejecen. Para pruebas de corta duración, esto puede no ser una preocupación grave, pero para mediciones industriales continuas, se debe incluir la compensación de temperatura y deriva.
Cada material de alambre de medidor de deformación tiene su factor de medición característico, resistencia, coeficiente de temperatura del factor de medición, coeficiente térmico de resistividad y estabilidad. Entre los materiales típicos se incluyen el constantan (aleación de cobre y níquel), el nicromo V (aleación de níquel y cromo), las aleaciones de platino (normalmente tungsteno), el isoelástico (aleación de níquel y hierro) o los alambres de aleación tipo Karma (aleación de níquel y cromo), láminas o materiales semiconductores. Las aleaciones más populares utilizadas para las galgas extensométricas son las aleaciones de cobre-níquel y las aleaciones de níquel-cromo. A mediados de la década de 1950, los científicos de los Laboratorios Bell descubrieron las características piezorresistivas del germanio y el silicio. Aunque los materiales mostraban una considerable no linealidad y sensibilidad a la temperatura, tenían factores de calibración más de cincuenta veces superiores y una sensibilidad más de cien veces superior a la de las galgas extensométricas de alambre o lámina metálica. Las obleas de silicio también son más elásticas que las metálicas. Después de ser sometidas a tensión, recuperan más fácilmente su forma original.
Alrededor de 1970, se desarrollaron los primeros extensómetros semiconductores (de silicio) para la industria de la automoción. A diferencia de otros tipos de galgas extensométricas, las galgas extensométricas semiconductoras dependen de los efectos piezorresistivos del silicio o el germanio y miden el cambio en la resistencia con la tensión, en lugar de con la deformación. El extensómetro semiconductor adherido es una oblea con el elemento de resistencia difundido en un sustrato de silicio. El elemento de la oblea no suele tener un soporte, y su adhesión a la superficie sometida a tensión requiere mucho cuidado, ya que solo se utiliza una fina capa de epoxi para fijarlo (Figura 2-4B). El tamaño es mucho más pequeño y el coste mucho menor que el de un sensor de lámina metálica. Los mismos epoxis que se utilizan para fijar los medidores de lámina también se utilizan para unir los medidores semiconductores.
Si bien la mayor resistencia unitaria y sensibilidad de los sensores de oblea semiconductora son ventajas indudables, su mayor sensibilidad a las variaciones de temperatura y su tendencia a la deriva son inconvenientes en comparación con los sensores de lámina metálica. Otro inconveniente de las galgas extensométricas semiconductoras es que la relación entre resistencia y deformación no es lineal, ya que varía entre un 10 y un 20 % con respecto a una ecuación lineal. Con instrumentos controlados por ordenador, estas limitaciones pueden superarse mediante la compensación por software.
Una mejora adicional es el medidor de deformación de película delgada, que elimina la necesidad de unión adhesiva (Figura 2-4C). El medidor se fabrica depositando primero un aislante eléctrico (normalmente de cerámica) sobre la superficie metálica sometida a tensión y, a continuación, depositando el medidor de deformación sobre esta capa aislante. Se utilizan técnicas de deposición al vacío o pulverización catódica para unir los materiales a nivel molecular.
Dado que el medidor de película delgada está unido molecularmente a la muestra, la instalación es mucho más estable y los valores de resistencia experimentan menos desviaciones. Otra ventaja es que el detector de fuerza sometido a tensión puede ser un diafragma metálico o una viga con una capa depositada de aislamiento de cerámica.
Las galgas extensométricas de semiconductores representan una mejora adicional en la tecnología de las galgas extensométricas, ya que eliminan la necesidad de agentes adhesivos. Al eliminar los agentes adhesivos, también se eliminan los errores debidos a la fluencia y la histéresis. La galga extensométrica de semiconductores utiliza técnicas de enmascaramiento fotolitográfico y difusión de boro en estado sólido para unir molecularmente los elementos de resistencia. Los cables eléctricos se conectan directamente al patrón (Figura 2-4D).
 Título de la leyenda de la imagen
Título de la leyenda de la imagen
El medidor difuso es limitado a aplicaciones de temperatura moderada y requiere compensación de temperatura. Los semiconductores difusos se utilizan a menudo como elementos sensores en transductores de presión. Son pequeños, económicos, precisos y repetibles, proporcionan un amplio rango de presión y generan una señal de salida potente. Entre sus limitaciones se encuentra la sensibilidad a las variaciones de la temperatura ambiente, que puede compensarse con diseños de transmisores inteligentes.
En resumen, el medidor de tensión ideal es pequeño en tamaño y masa, de bajo coste, fácil de instalar y muy sensible a la tensión, pero insensible a las variaciones de la temperatura ambiente o del proceso.
Galgas extensométricas de resistencia adheridas
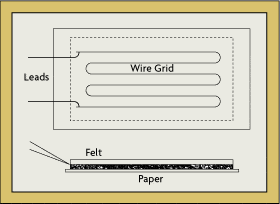
La galga extensométrica de semiconductores adherida se describe esquemáticamente en las imágenes 2-4A y 2-4B. Estos dispositivos representan un método popular para medir la deformación. El medidor consiste en una rejilla de alambre metálico muy fino, lámina o material de semiconductores adherido a la superficie deformada o matriz portadora mediante una fina capa aislante de epoxi (Figura 2-5). Cuando la matriz portadora se deforma, la deformación se transmite al material de la rejilla a través del adhesivo. Las variaciones en la resistencia eléctrica de la rejilla se miden como indicación de la deformación. La forma de la rejilla está diseñada para proporcionar la máxima resistencia del medidor, manteniendo al mismo tiempo la longitud y la anchura del medidor al mínimo.
Los medidores de deformación de resistencia adheridos gozan de buena reputación. Son relativamente económicos, pueden alcanzar una precisión global superior al +/-0,10 %, están disponibles en longitudes cortas, solo se ven moderadamente afectados por los cambios de temperatura, tienen un tamaño físico reducido y una masa baja, y son muy sensibles. Las galgas extensométricas adheridas se pueden utilizar para medir tanto la deformación estática como la dinámica.
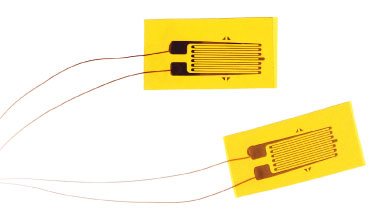 Título de la leyenda de la imagen Al unir los elementos del medidor de deformación a una superficie sometida a tensión, es importante que el medidor experimente la misma deformación que el objeto. Con un material adhesivo insertado entre los sensores y la superficie sometida a tensión, la instalación es sensible a la fluencia debido a la degradación de la unión, las influencias de la temperatura y la histéresis causada por la deformación termoelástica. Dado que muchos pegamentos y resinas epoxi son propensos a la fluencia, es importante utilizar resinas diseñadas específicamente para galgas extensométricas.
Título de la leyenda de la imagen Al unir los elementos del medidor de deformación a una superficie sometida a tensión, es importante que el medidor experimente la misma deformación que el objeto. Con un material adhesivo insertado entre los sensores y la superficie sometida a tensión, la instalación es sensible a la fluencia debido a la degradación de la unión, las influencias de la temperatura y la histéresis causada por la deformación termoelástica. Dado que muchos pegamentos y resinas epoxi son propensos a la fluencia, es importante utilizar resinas diseñadas específicamente para galgas extensométricas.
El extensómetro de resistencia adherido es adecuado para una amplia variedad de condiciones ambientales. Puede medir la deformación en turbinas de motores a reacción que funcionan a temperaturas muy altas y en aplicaciones de fluidos criogénicos a temperaturas tan bajas como -452 °F (-269 °C). Tiene baja masa y tamaño, alta sensibilidad y es adecuado para aplicaciones estáticas y dinámicas. Los elementos de lámina están disponibles con resistencias unitarias de 120 a 5000 ohmios. Las longitudes de medición disponibles en el mercado van de 0,008 pulgadas a 4 pulgadas. Las tres consideraciones principales en la selección de la medición son: la temperatura de funcionamiento, la naturaleza de la deformación que se va a detectar y los requisitos de estabilidad. Además, la selección del material de soporte, la aleación de la rejilla, el adhesivo y el revestimiento protector adecuados garantizará el éxito de la aplicación.

DwyerOmega | Blog | ¿Qué es un manómetro?
Escrito por: Dan Schultz
Actualizado el: 30 de octubre de 2025

Entender el significado de «intrínsecamente seguro»
Escrito por:
Dan Schultz
Publicado el: 30 de marzo de 2026