Un motor paso a paso es un motor eléctrico síncrono sin escobillas que convierte impulsos digitales en rotación mecánica del eje. Cada revolución del motor paso a paso se divide en un número discreto de pasos, en muchos casos 200 pasos, y se debe enviar al motor un impulso separado para cada paso. El motor paso a paso solo puede dar un paso cada vez y cada paso es del mismo tamaño. Dado que cada pulso hace que el motor gire un ángulo preciso, normalmente 1,8°, la posición del motor se puede controlar sin ningún mecanismo de retroalimentación. A medida que la frecuencia de los pulsos digitales aumenta, el movimiento por pasos se convierte en una rotación continua, siendo la velocidad de rotación directamente proporcional a la frecuencia de los pulsos. Los motores paso a paso se utilizan a diario en aplicaciones industriales y comerciales debido a su bajo coste, alta fiabilidad, alto par a bajas velocidades y una construcción sencilla y robusta que funciona en casi cualquier entorno.
Ventajas del motor paso a paso
Conversión de una señal de entrada no lineal en una señal de salida lineal. Esto es habitual en las señales de termopares.
El ángulo de rotación del motor es proporcional al pulso de entrada.
El motor tiene un par completo en reposo (si los devanados están energizados).
Posicionamiento preciso y repetibilidad del movimiento, ya que los buenos motores paso a paso tienen una precisión del 3 al 5 % de un paso y este error no es acumulativo de un paso al siguiente.
Excelente respuesta al arranque/parada/inversión.
Muy fiables, ya que no hay escobillas de contacto en el motor. Por lo tanto, la vida útil del motor paso a paso depende simplemente de la vida útil del cojinete.
La respuesta de los motores paso a paso a los impulsos de entrada digitales proporciona un control de bucle abierto, lo que hace que el motor sea más sencillo y menos costoso de controlar.
Es posible lograr una rotación síncrona a muy baja velocidad con una carga acoplada directamente al eje.
Se puede conseguir una amplia gama de velocidades de rotación, ya que la velocidad es proporcional a la frecuencia de los pulsos de entrada.
Tipos de motores paso a paso
Hay tres tipos básicos de motores paso a paso: de reluctancia variable, de imán permanente e híbridos. Este análisis se centrará en los motores híbridos, ya que estos motores paso a paso combinan las mejores características de los motores de reluctancia variable y de imán permanente. Están construidos con polos estatóricos de múltiples dientes y un rotor de imán permanente. Los motores híbridos estándar tienen 200 dientes en el rotor y giran con ángulos de paso de 1,8º. Debido a que presentan un alto par estático y dinámico y funcionan a velocidades de paso muy altas, los motores paso a paso híbridos se utilizan en una amplia variedad de aplicaciones comerciales, como unidades de disco de ordenador, impresoras/trazadores y reproductores de CD. Algunas aplicaciones industriales y científicas de los motores paso a paso incluyen la robótica, las máquinas herramienta, las máquinas de recogida y colocación, las máquinas automáticas de corte y unión de cables e incluso los dispositivos de control preciso de fluidos.
Modos de paso
Los «modos de paso» de los motores paso a paso incluyen paso completo, medio paso y micropasos. El tipo de salida del modo de paso de cualquier motor paso a paso depende del diseño del controlador. OMEGA ofrece controladores de motores paso a paso con modos de paso completo y medio seleccionables por el usuario mediante conmutador, así como controladores de micropasos con resoluciones seleccionables por el usuario o mediante software.
PASO COMPLETO
Los motores paso a paso híbridos estándar tienen 200 dientes en el rotor, o 200 pasos completos por revolución del eje del motor. Si se dividen los 200 pasos en los 360° de rotación, se obtiene un ángulo de paso completo de 1,8°. Normalmente, el modo de paso completo se consigue activando ambos devanados mientras se invierte la corriente de forma alterna. Básicamente, un pulso digital del controlador equivale a un paso.
MEDIO PASO;
;Medio paso significa simplemente que el motor paso a paso gira a 400 pasos por revolución. En este modo, se activa un devanado y luego se activan dos devanados alternativamente, lo que hace que el rotor gire a la mitad de la distancia, o 0,9°. Aunque proporciona aproximadamente un 30 % menos de par, el modo de medio paso produce un movimiento más suave que el modo de paso completo.
Half step simply means that the step motor is rotating at 400 steps per revolution. In this mode, one winding is energized and then two windings are energized alternately, causing the rotor to rotate at half the distance, or 0.9°. Although it provides approximately 30% less torque, half-step mode produces a smoother motion than full-step mode.
MICROPASO
El micropaso es una tecnología de motor paso a paso relativamente nueva que controla la corriente en el devanado del motor hasta un grado que subdivide aún más el número de posiciones entre los polos. Los accionamientos de micropasos OMEGA son capaces de dividir un paso completo (1,8°) en 256 micropasos, lo que da como resultado 51 200 pasos por revolución (0,007°/paso). El microstepping se utiliza normalmente en aplicaciones que requieren un posicionamiento preciso y un movimiento más suave en un amplio rango de velocidades. Al igual que el modo de medio paso, el microstepping proporciona aproximadamente un 30 % menos de par que el modo de paso completo.
Control de movimiento lineal
El movimiento giratorio de un motor paso a paso se puede convertir en movimiento lineal utilizando un sistema de accionamiento de husillo/engranaje helicoidal. El paso del husillo es la distancia lineal recorrida por una revolución del husillo. Si el paso es igual a una pulgada por revolución y hay 200 pasos completos por revolución, la resolución del sistema de husillo es de 0,005 pulgadas por paso. Es posible obtener una resolución aún mayor utilizando el sistema de motor paso a paso/accionamiento en modo de micropasos.
Conexión en serie frente a conexión en paralelo Hay dos formas de conectar un motor paso a paso: en serie o en paralelo. Una conexión en serie proporciona una alta inductancia y, por lo tanto, un mayor par a bajas velocidades. Una conexión en paralelo reducirá la inductancia, lo que se traduce en un mayor par a velocidades más altas.
Descripción general de la tecnología del controlador
El controlador del motor paso a paso recibe señales de paso y dirección del indexador o del sistema de control y las convierte en señales eléctricas para hacer funcionar el motor paso a paso. Se requiere un pulso por cada paso del eje del motor. En el modo de paso completo, con un motor estándar de 200 pasos, se requieren 200 pulsos de paso para completar una revolución. La velocidad de rotación es directamente proporcional a la frecuencia de los impulsos. Algunos controladores tienen un oscilador integrado que permite utilizar una señal analógica externa o un joystick para ajustar la velocidad del motor.
El rendimiento de la velocidad y el par del motor paso a paso se basa en el flujo de corriente desde el controlador al devanado del motor. El factor que inhibe el flujo, o limita el tiempo que tarda la corriente en energizar el devanado, se conoce como inductancia. Debido a los efectos de la inductancia, la mayoría de los circuitos controladores están diseñados para suministrar una tensión superior a la tensión nominal del motor. Cuanto mayor sea la tensión de salida del controlador, mayor será el nivel de par en relación con la velocidad. Por lo general, la tensión de salida del controlador (tensión del bus) debe ser entre 5 y 20 veces superior a la tensión nominal del motor. Para proteger el motor de posibles daños, el controlador del motor paso a paso debe tener una limitación de corriente igual a la tensión nominal del motor paso a paso.
Descripción general del indexador
El indexador, o controlador, proporciona salidas de paso y dirección al controlador. La mayoría de las aplicaciones requieren que el indexador gestione también otras funciones de control, como la aceleración, la desaceleración, los pasos por segundo y la distancia. El indexador también puede interactuar con muchas otras señales externas y controlarlas.
La comunicación con el indexador se realiza a través de un puerto serie RS-232 y, en algunos casos, un puerto RS485. En cualquier caso, el indexador es capaz de recibir comandos de alto nivel desde un ordenador central y generar los impulsos de paso y dirección necesarios para el controlador.
El indexador incluye E/S auxiliares para supervisar entradas de fuentes externas, como un interruptor de marcha, avance lento, inicio o límite. También puede iniciar otras funciones de la máquina a través de los pines de salida de E/S.
Funcionamiento autónomo
En modo autónomo, el indexador puede funcionar independientemente del ordenador central. Una vez descargados en la memoria no volátil, los programas de movimiento pueden iniciarse desde varios tipos de interfaces de operador, como un teclado o una pantalla táctil, o desde un interruptor a través de las entradas de E/S auxiliares. Un sistema de control de motor paso a paso autónomo suele incluir un controlador y una fuente de alimentación, así como una retroalimentación de encoder opcional para aplicaciones de «bucle cerrado» que requieren detección de bloqueo y compensación exacta de la posición del motor.

Control multieje
En tales casos, el sistema de control multieje es disponible. Un concentrador de red HUB 444, por ejemplo, puede tener hasta cuatro accionamientos paso a paso conectados a él, cada uno de los cuales está conectado a un motor paso a paso independiente. El concentrador de red proporciona un movimiento coordinado para aplicaciones que requieren un alto grado de sincronización, como la interpolación circular o lineal.
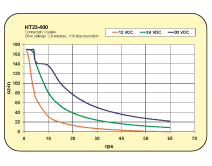
Elección de un motor paso a paso y un accionamiento
La elección de un motor paso a paso depende de los requisitos de par y velocidad de la aplicación. Utilice la curva de par-velocidad del motor (que se encuentra en las especificaciones de cada accionamiento) para seleccionar un motor que se adapte a la tarea. Todos los accionamientos paso a paso de la línea OMEGA muestran las curvas de par-velocidad para los motores recomendados para ese accionamiento. Si sus requisitos de par y velocidad pueden satisfacerse con varios motores paso a paso, elija un accionamiento en función de las necesidades de su sistema de movimiento (paso/dirección, programable independiente, Entradas analógicas, micropasos) y, a continuación, elija uno de los motores recomendados para ese accionamiento. La lista de motores recomendados se basa en pruebas exhaustivas realizadas por el Fabricante para garantizar un rendimiento óptimo de la combinación de motor paso a paso y accionamiento.

Elija el motor paso a paso adecuado para su aplicación

Paso y dirección
Estos accionamientos de motor paso a paso aceptan impulsos de paso y señales de dirección/activación procedentes de un controlador, como un PLC o un PC. Cada impulso de paso hace que el motor gire un ángulo preciso, y la frecuencia de los impulsos determina la velocidad de rotación. La señal de dirección determina el sentido de rotación (CW o CCW), mientras que la señal de habilitación enciende o apaga el motor.

Oscilador
Los motores paso a paso con oscilador digital integrado aceptan una entrada analógica o un joystick para controlar la velocidad. Estos sistemas se utilizan generalmente en aplicaciones que requieren un movimiento continuo en lugar de un control de posición, como mezcladoras, batidoras y dispensadores.

Programable de forma independiente
Todos estos accionamientos paso a paso se pueden programar para funcionar de forma independiente; el programa de control de movimiento se crea con una sencilla interfaz de software de alto nivel de arrastrar y soltar (incluida gratuitamente) y, a continuación, se descarga y se ejecuta al encender el dispositivo. El programa de control de movimiento suele esperar una entrada, como el cierre de un conmutador o la pulsación de un botón, antes de ejecutar el movimiento programado.

Motores paso a paso de alto rendimiento
Estos accionamientos para motores paso a paso ofrecen funciones avanzadas como diagnóstico automático, protección contra fallos, autoajuste, suavizado de la ondulación del par, suavizado de la señal de comando y algoritmos antirresonancia. Algunos accionamientos son programables de forma independiente, mientras que otros ofrecen entradas analógicas y de paso/dirección. Los accionamientos de alto rendimiento proporcionarán el mejor rendimiento posible para su sistema de control de movimiento.
- Ventajas de los motores paso a paso
- Tipos de motores paso a paso
- Modos de paso
- Descripción general de la tecnología de controladores
- Descripción general del indexador
- Funcionamiento autónomo
- Control multieje
- Selección de un motor paso a paso y un accionamiento
- Seleccione el motor paso a paso adecuado


Cable con aislamiento mineral | Usos y ventajas de su uso ¿Cuáles son las ventajas del cable con aislamiento mineral?