Un equipo de ingenieros de Omega, liderado por el director de ingeniería Ken Leibig, se propuso averiguar si podían idear una alternativa mejor, más eficiente y rentable que el método actual para medir con precisión la temperatura de los fluidos dentro de una tubería, que consiste en utilizar una sonda de inmersión invasiva.
El fruto de su trabajo: el innovador Sensor de temperatura de abrazadera no invasivo y de alta precisión HANI™ de Omega.

El HANI se instala con la facilidad de un sensor de superficie*, pero ofrece la alta precisión y el alto rendimiento de un sensor de inmersión. Es lo mejor de ambos mundos y supone un cambio revolucionario para los profesionales de una amplia gama de sectores, desde la alimentación y las bebidas hasta la Industria farmacéutica y aeroespacial.
Pero, ¿cómo funciona?
Ley de Fourier sobre la conducción del calor
La tecnología que hace posible el sensor HANI se basa en la ley de la conducción del calor, también conocida como ley de Fourier. La ley de Fourier establece que la tasa de transferencia de calor a través de un material es proporcional al gradiente negativo de la temperatura y al área, en ángulo recto con respecto a ese gradiente, a través de la cual fluye el calor.
La tecnología HANI parte de la forma diferencial de la ley de Fourier sobre la conducción térmica, que muestra que la densidad del flujo térmico local q es igual al producto de la conductividad térmica k y el gradiente de temperatura local negativo.

La densidad del flujo térmico es la cantidad de energía que fluye a través de una unidad de área por unidad de tiempo. Para muchas aplicaciones simples, la ley de Fourier se utiliza en su forma unidimensional:

Si centramos nuestra atención en una placa con un espesor de pared «∆X», esa misma densidad de flujo térmico se puede simplificar basándose en el gradiente de temperatura entre la temperatura exterior de la placa y la temperatura interior de la placa, dividido por el espesor de dicha placa.

Si reorganizáramos esa ecuación, podríamos resolver la temperatura en el interior de la placa.

- «q» = densidad del flujo térmico
- «k» = conductividad térmica
- ▽ = gradiente de temperatura
- T out = Temperatura (fuera del tubo)
- T in = Temperatura (interior del tubo)
- ∆X = espesor de la pared
Por lo tanto, siempre que conozcamos la conductividad térmica y el espesor de la placa que se está midiendo, podemos calcular la temperatura del otro lado. Por supuesto, esta ecuación es para la transferencia de calor unidimensional; por lo tanto, para un tubo con un espesor t y un radio exterior r, se debe aplicar un factor de forma:

Lo cual se puede sustituir en nuestra ecuación anterior para la transferencia de calor unidimensional:

Analicemos todo esto:
Supongamos que tienes una tubería por la que circula un fluido; ese fluido está a una temperatura T in, y es lo que queremos resolver. Quieres saber la temperatura de ese medio fluido. Quizás incluso en un punto específico dentro de su sistema.
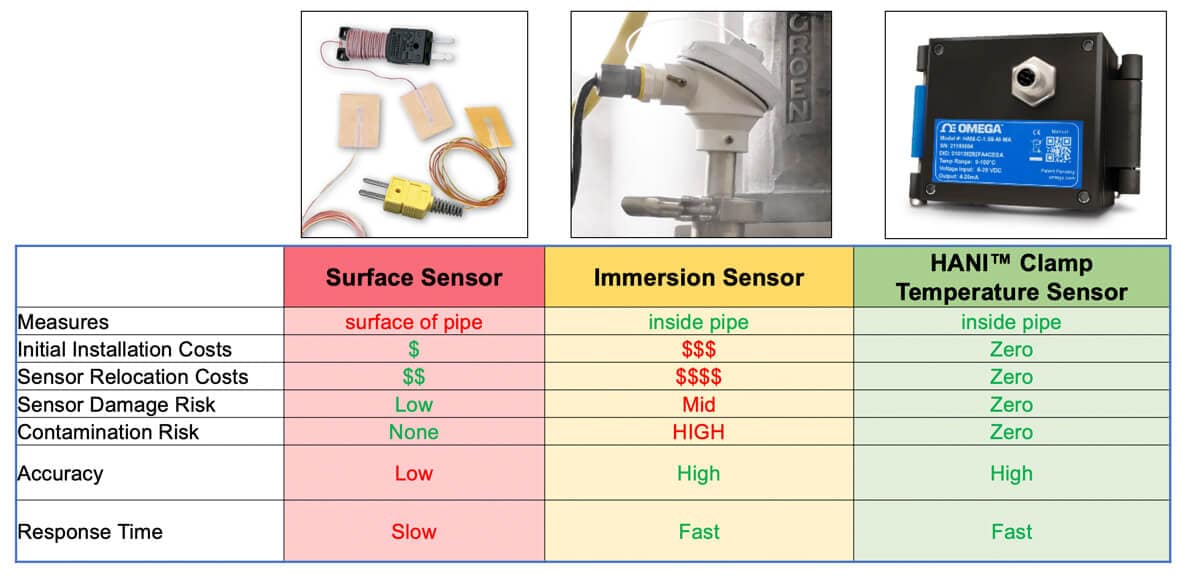
Podría utilizar un Sensor de superficie*, pero estaría sacrificando precisión, algo que los profesionales de una amplia variedad de industrias simplemente no pueden hacer.
O podría utilizar un sensor de inmersión, que es la opción preferida por la mayoría de los profesionales debido a su alta precisión. Pero los sensores de inmersión son invasivos para el sistema, y esto a menudo puede causar problemas, como dolores de cabeza con la instalación, costes de mantenimiento adicionales, riesgos de contaminación y tiempos de inactividad no deseados.
Pero ahora existe una tercera opción: el HANI.
Con su innovador diseño de sujeción, el sensor HANI se monta como un sensor de superficie y se puede instalar literalmente en segundos: solo hay que sujetarlo y fijarlo al exterior de una tubería, y comenzará inmediatamente a calcular la temperatura dentro de la tubería. No hay ninguna sonda invasiva de NINGÚN tipo, por lo que no es necesario realizar taladros ni soldaduras para instalar sensores de inmersión. Y como el HANI no es invasivo, funciona sin entrar en contacto con el medio de proceso dentro de la tubería, lo que elimina el riesgo de rotura o deriva del sensor.

Por lo tanto, el HANI se instala como un Sensor de superficie*. Eso está muy bien, pero ¿qué hay de la precisión? Para superar las imprecisiones de estos sensores de superficie, el HANI utiliza un Sensor de flujo térmico además de un Sensor de superficie cuidadosamente acoplado.
El significado es que el HANI cuenta con un RTD, que se coloca en el exterior de la tubería, de forma muy similar a un sensor de temperatura superficial, y que mide la temperatura del exterior de la tubería, que podemos denominar: T out.
El HANI también cuenta con un sensor de flujo térmico que también se coloca en el exterior de la tubería. Un sensor de flujo térmico es, básicamente, una Termopila de película delgada que indica la cantidad de pérdida de calor o entrada de calor en la tubería. Esa es la variable «q» en la ecuación de Fourier.
El HANI utiliza estos dos elementos, la T out y el Gradiente de temperatura, y los introduce en su algoritmo patentado.
Además, tiene en cuenta algunas entradas introducidas por el usuario: el diámetro de la tubería, el grosor de la tubería y el material de los tubos.
THANI es el resultado de nuestro algoritmo patentado y es esencialmente igual a la temperatura dentro de la tubería (con una precisión de más o menos medio grado).
¿Demasiado bueno para ser verdad?
Para ilustrar la eficacia de la tecnología HANI, Ken y su equipo realizaron algunos experimentos. Para empezar, se hizo pasar un fluido a baja temperatura por una tubería. En esta tubería, el equipo de ingeniería había instalado un sensor de inmersión (de modo que su sonda estuviera dentro de la tubería), había montado un sensor de superficie en el exterior de la tubería y había fijado un sensor HANI también en el exterior de la tubería. Después de ocho segundos, se abrió una válvula que mezcló fluidos calientes.
Ken y su equipo querían comparar la precisión y los tiempos de respuesta de esos tres tipos de sensores.
Este gráfico ilustra lo que ocurrió.
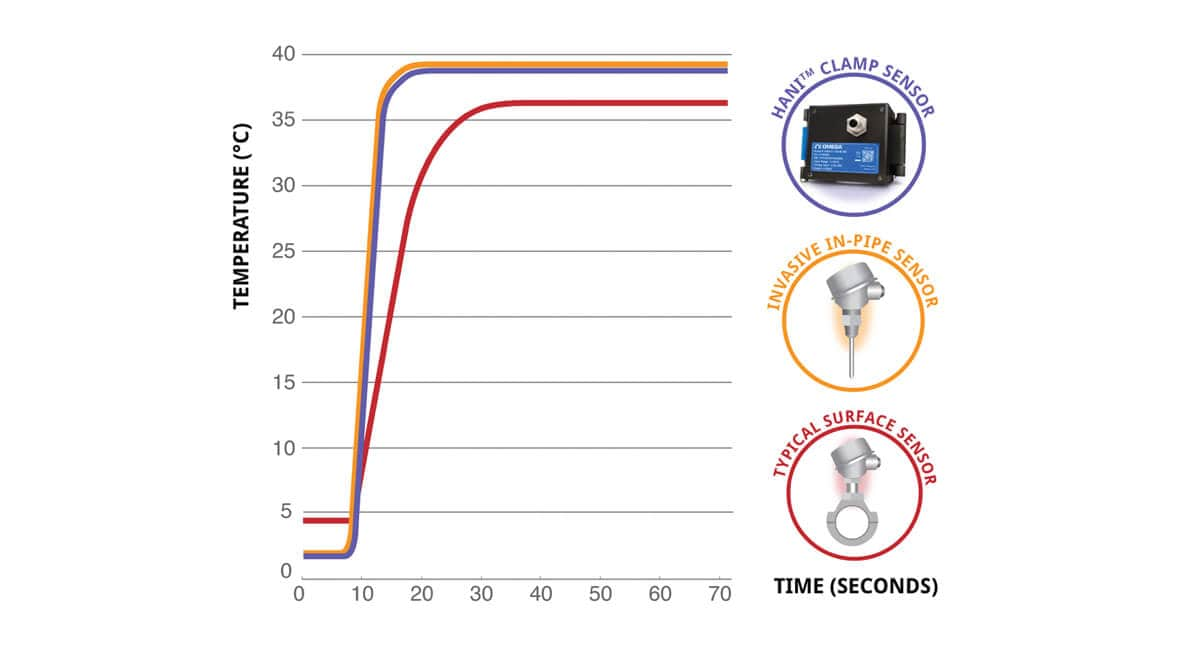
Se puede observar que el sensor de superficie, que está en rojo, tiene imprecisiones en los estados estables: tanto en las temperaturas más bajas como en las más altas tiende hacia la temperatura ambiente, por lo que hay una diferencia de más o menos un 10 % como mínimo. Estos sensores de superficie son muy imprecisos y muy lentos en su respuesta.
El sensor de inmersión, por otro lado, es amarillo y es muy preciso y responde muy rápido.
Y el HANI, que es de color azul, se alinea justo encima del tiempo de respuesta del sensor de inmersión, lo que ilustra que es tan preciso y tan rápido en su respuesta como el sensor de inmersión.
El Sensor de temperatura de abrazadera HANI™ de Omega es, en pocas palabras, lo mejor de ambos mundos, e IDEAL para muchas aplicaciones diferentes en las que la precisión es fundamental, pero las sondas invasivas causan problemas. Obtenga más información sobre el Sensor de temperatura de abrazadera HANI™ de Omega aquí.

¿Qué es un calentador de inmersión? Tipo de elementos calefactores de inmersión ¿Qué es un calentador de inmersión?

¿Qué es un calentador eléctrico industrial? ¿Qué es un calentador industrial?