A team of Omega engineers, led by Director of Engineering Ken Leibig, set out to see if they could come up with a better, plus efficace et plus rentable que la méthode actuelle pour mesurer avec précision la température des liquides à l'intérieur d'un tuyau, qui consiste à utiliser une sonde à immersion invasive.
Le fruit de leur travail : le capteur de température à pince non invasif haute précision HANI™ d'Omega, une véritable innovation.

Le capteur HANI s'installe aussi facilement qu'un capteur de surface, mais offre la précision élevée et les performances élevées d'un capteur à immersion. Il combine le meilleur des deux mondes et change la donne pour les professionnels d'un large éventail de secteurs, de l'alimentation et des boissons à l'industrie pharmaceutique en passant par l'aérospatiale.
Mais comment fonctionne-t-il ?
La loi de Fourier sur la conduction thermique
La technologie qui rend possible le capteur HANI est basée sur la loi de la conduction thermique, également connue sous le nom de loi de Fourier. La loi de Fourier stipule que le taux de transfert de chaleur à travers un matériau est proportionnel au gradient thermique négatif et à la surface, perpendiculaire à ce gradient, à travers laquelle la chaleur circule.
La technologie HANI repose sur la forme différentielle de la loi de Fourier sur la conduction thermique, qui montre que la densité de flux thermique local q est égale au produit de la conductivité thermique k et du gradient thermique local négatif.

La densité du flux thermique est la quantité d'énergie qui traverse une unité de surface par unité de temps. Pour de nombreuses applications simples, la loi de Fourier est utilisée sous sa forme unidimensionnelle :

Si nous nous intéressons à une plaque dont l'épaisseur est « ∆X », cette même densité de flux thermique peut être simplifiée en fonction du Gradient thermique entre la température à l'extérieur de la plaque et la température à l'intérieur de la plaque, divisé par l'épaisseur de cette plaque.

Si nous réorganisons ensuite cette équation, nous pouvons calculer la température à l'intérieur de la plaque.

- « q » = densité du flux thermique
- « k » = Conductivité thermique
- ▽ = Gradient thermique
- T out = Temp (à l'extérieur du tuyau)
- T in = Temp (à l'intérieur du tuyau)
- ∆X = épaisseur de la paroi
Ainsi, tant que nous connaissons la Conductivité thermique et l'épaisseur de la plaque mesurée, nous pouvons calculer la température de l'autre côté. Bien sûr, cette équation concerne le transfert de chaleur unidimensionnel ; ainsi, pour un tuyau d'épaisseur t et de rayon extérieur r, un facteur de forme doit être appliqué :

Ce qui peut être substitué dans notre équation précédente pour le transfert de chaleur unidimensionnel :

Décomposons tout cela :
Supposons que vous ayez un tuyau dans lequel circule un fluide – ce fluide est à la température T in, et c'est ce que nous voulons déterminer. Vous voulez connaître la température de ce fluide. Peut-être même à un point précis de votre système.
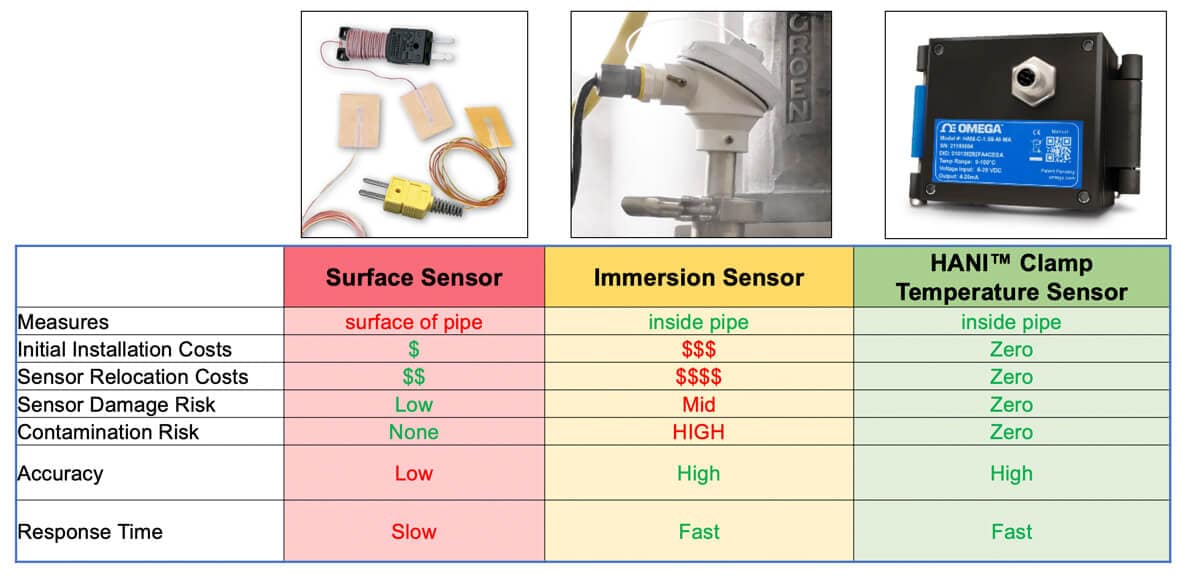
Vous pourriez utiliser un Capteur de surface* traditionnel, mais vous sacrifieriez la précision, ce que les professionnels de nombreux secteurs ne peuvent tout simplement pas se permettre.
Vous pourriez également utiliser un capteur à immersion, qui est le choix privilégié de la plupart des professionnels en raison de sa précision élevée. Mais les capteurs à immersion sont invasifs pour le système, ce qui peut souvent causer des problèmes, tels que des difficultés d'installation, des coûts d'entretien & service supplémentaires, des risques de Contamination et des temps d'arrêt indésirables.
Il existe désormais une troisième option : le HANI.
Grâce à sa conception innovante à collier, le capteur HANI s'installe comme un capteur de surface et peut être installé en quelques secondes : il suffit de le fixer à l'extérieur d'un tuyau pour qu'il commence immédiatement à calculer la température à l'intérieur du tuyau. Il n'y a AUCUNE sonde invasive, donc aucun perçage ou soudage n'est nécessaire pour installer des capteurs à immersion. Et comme le HANI est non invasif, il fonctionne sans entrer en contact avec le milieu du processus à l'intérieur du tuyau, ce qui élimine le risque de rupture ou de dérive du capteur.

Le HANI s'installe donc comme un capteur de surface. C'est très bien, mais qu'en est-il de la précision ? Eh bien, pour pallier les imprécisions de ces capteurs de surface, le HANI utilise un capteur de flux thermique en plus d'un capteur de surface soigneusement couplé.
Cela signifie que le HANI est équipé d'un RTD, qui est placé à l'extérieur du tuyau, un peu comme un capteur de température de surface, et qui mesure la température à l'extérieur du tuyau, que nous pouvons appeler : T out.
Le HANI est également équipé d'un capteur de flux thermique qui est également placé à l'extérieur de ce tuyau. Un capteur de flux thermique est, en gros, une thermopile à couche mince qui indique la quantité de chaleur perdue ou entrant dans le tuyau. Il s'agit de la variable « q » dans l'équation de Fourier.
Le HANI utilise ces deux éléments – la T out et le Gradient thermique – et les intègre dans son algorithme propriétaire.
De plus, il prend en compte quelques données fournies par l'utilisateur : le diamètre du tuyau, son épaisseur et son matériau.
Le THANI est le résultat de notre algorithme propriétaire et correspond essentiellement à la température à l'intérieur du tuyau (avec une précision de plus ou moins un demi-degré).
Trop beau pour être vrai ?
Pour illustrer l'efficacité de la technologie HANI, Ken et son équipe ont mené plusieurs expériences. Pour commencer, un liquide a été acheminé à basse température dans un tuyau. Sur ce tuyau, l'équipe d'ingénieurs avait installé un capteur à immersion (de sorte que sa sonde se trouvait à l'intérieur du tuyau), avait monté un capteur de surface à l'extérieur du tuyau et avait également fixé un capteur HANI à l'extérieur du tuyau. Au bout de huit secondes, une vanne a été ouverte pour mélanger un fluide chaud.
Ken et son équipe voulaient comparer la précision et les temps de réponse de ces trois types de capteurs.
Ce graphique illustre ce qui s'est passé.
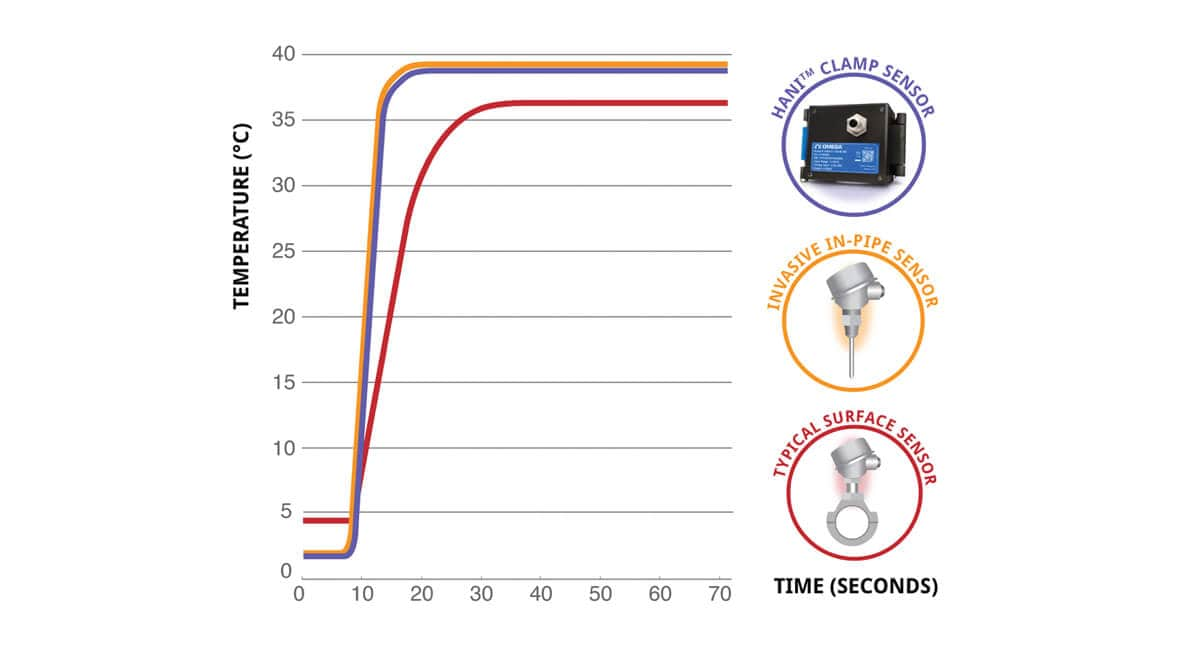
Vous pouvez remarquer que le capteur de surface, représenté en rouge, présente une imprécision à l'état stable : à des températures basses et élevées, il tend vers la température ambiante, avec un écart d'au moins 10 %. Ces capteurs de surface sont très imprécis et très lents à réagir.
Le capteur à immersion, quant à lui, est représenté en jaune. Il est extrêmement précis et réagit très rapidement.
Et le HANI, qui est en bleu, se trouve juste au-dessus du temps de réponse du capteur à immersion, ce qui montre qu'il est tout aussi précis et rapide que le capteur à immersion.
Le capteur de température à collier HANI™ d'Omega est, en termes simples, le meilleur des deux mondes – et IDÉAL pour de nombreuses applications différentes où la précision est essentielle, mais où les sondes invasives posent des problèmes. Pour en savoir plus sur le capteur HANI™ d'Omega, rendez-vous sur ici.

Qu'est-ce qu'un thermoplongeur ? Types d'éléments chauffants à immersion Qu'est-ce qu'un thermoplongeur ?

Qu'est-ce qu'un chauffage électrique industriel ? Qu'est-ce qu'un appareil de chauffage industriel ?